
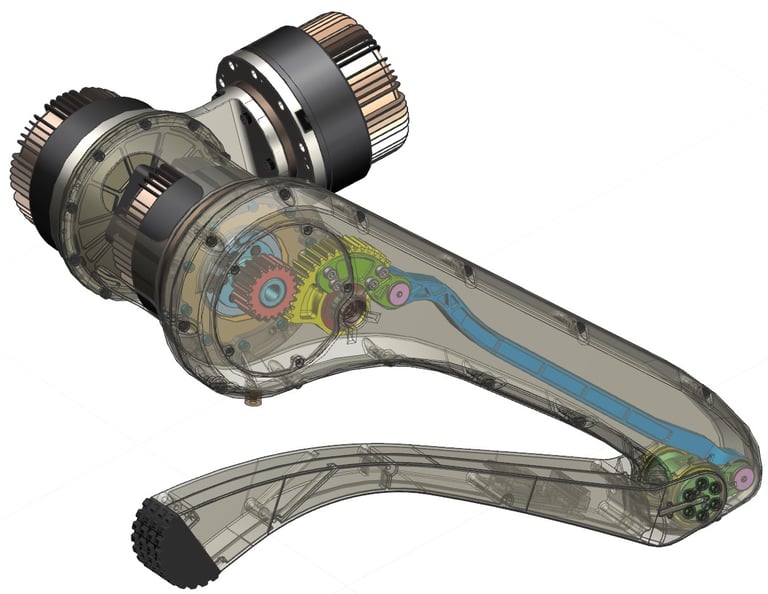
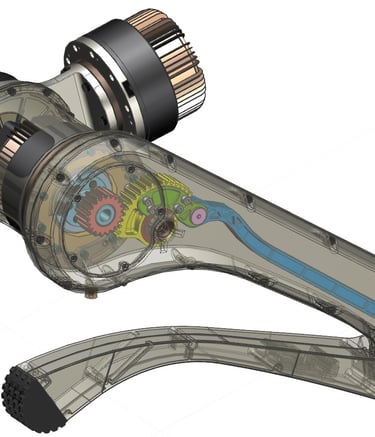
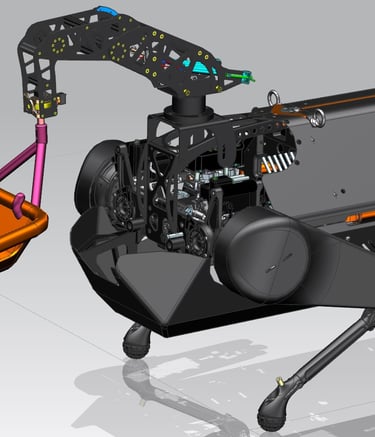
Space-Grade Quadruped Robotic Leg for Lunar Exploration
Design and development of a high-torque (220 Nm), ultra-lightweight (2.6 kg) robotic leg with sealed joints for operation in extreme lunar environments.




2025 - Present
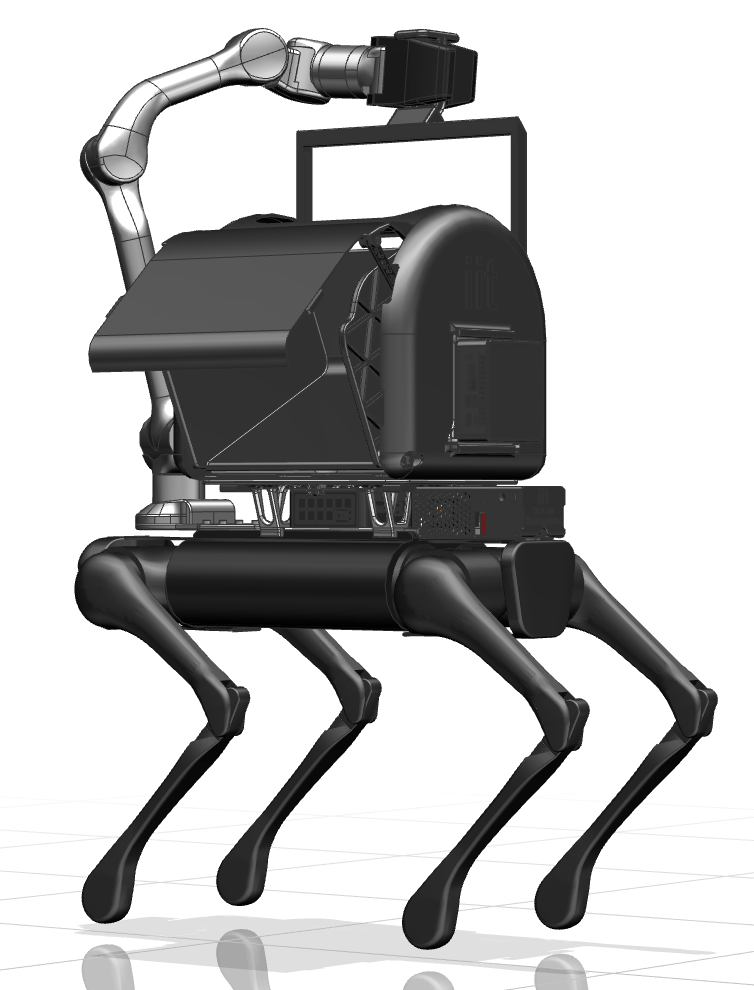

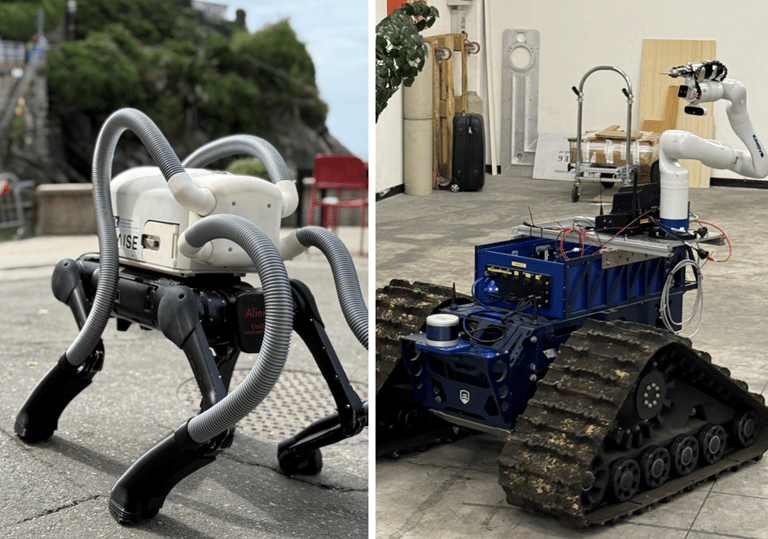
Autonomous Litter Collection System for Quadruped Robots
Development of a mobile manipulation system enabling quadruped robots to detect, grasp, and collect litter in unstructured outdoor environments.
2024 - 2025
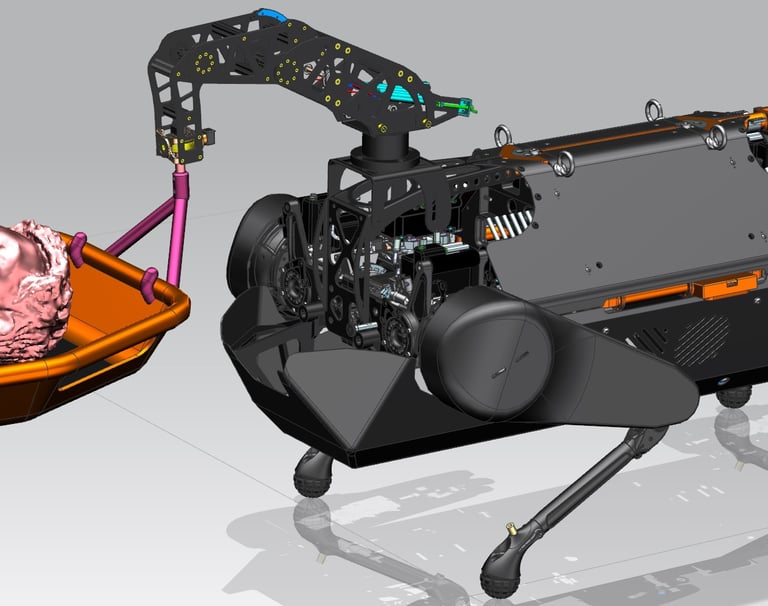
Pssive Arm: Collaborative Payload Transport with Dual-Quadruped Robotic Arm System
Design of a 5-DOF passive robotic arm enabling coordinated load transport between two quadruped robots carrying heavy payloads.
2025 - 2026


Infrastructure Inspection using Quadruped Robots and Drones
Development of an autonomous inspection system combining legged robots and drones for detecting structural defects such as cracks.
2024 - 2025
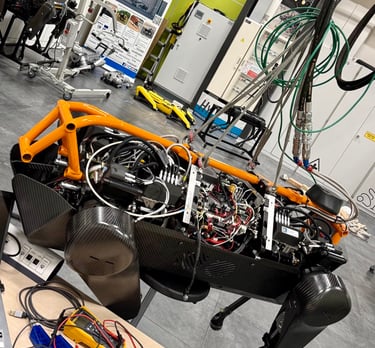
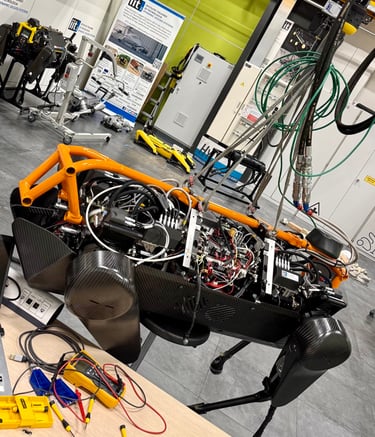
HyQ Real 1 - HyQ Real 2 - HyQ Real 3:
Assembly, Development, Maintenance
Design of a robotic manipulation system for autonomous pruning tasks using a mobile robot platform in agricultural environments.
2023 - Present
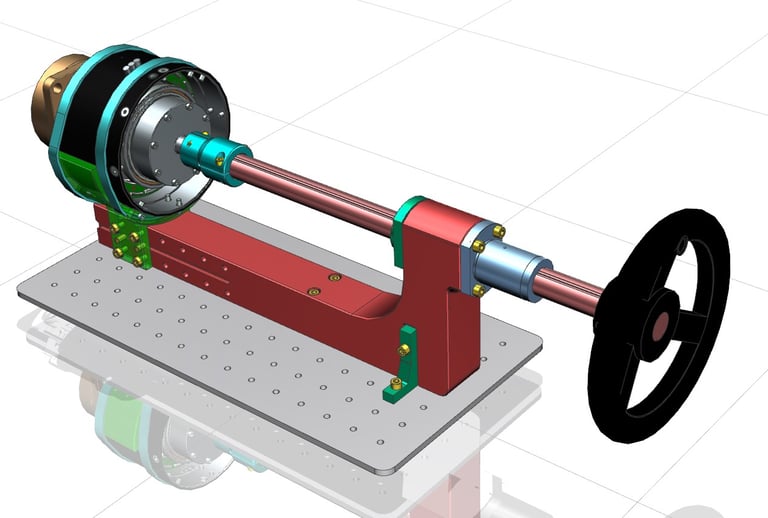
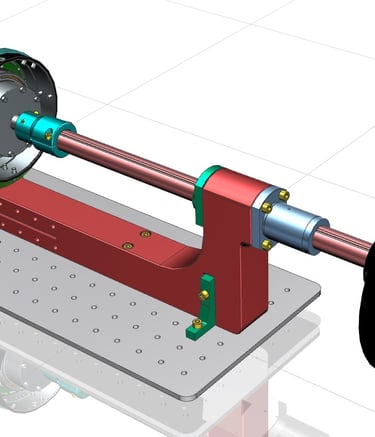
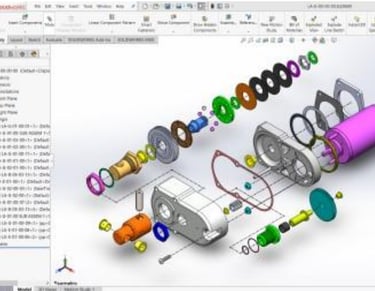
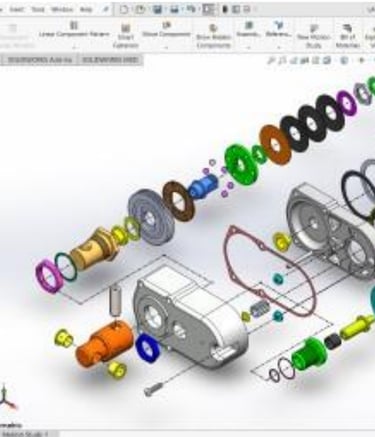
Rotor Assembly Rig
Design of a robotic manipulation system for autonomous pruning tasks using a mobile robot platform in agricultural environments.
2024
Supported With:
VINUM Project: A robotic platform for grapevine winter pruning automation
- Mechanical Integration for a Mobile Manipulation System
VERO Project: A vacuum-cleaner-equipped quadruped robot for litter removal in hard-to-reach environments
- Mechanical Support and System Improvement for a Quadruped Litter Collection Robot
2024 - 2025
My Projects at FUM Robotics Lab
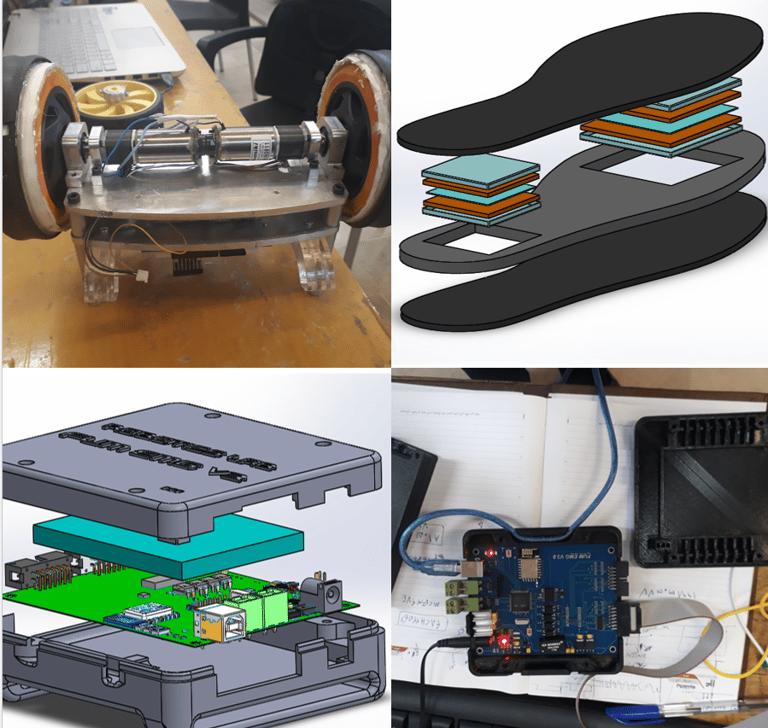
Wearable EMG Sensor System for Human Motion Monitoring
Lower-Limb Exoskeleton Foot Design and Optimization
Self-Balancing Two-Wheeled Robot: Dynamics and Control


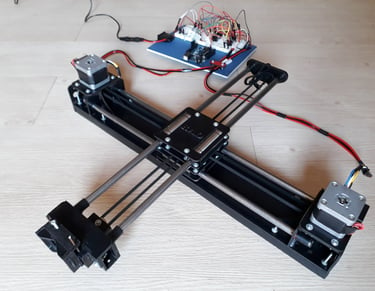
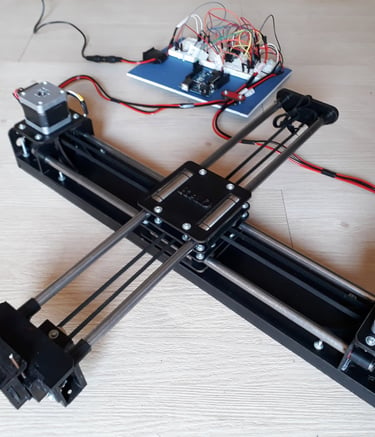
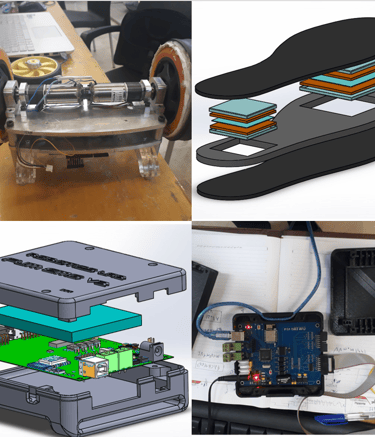
2-Axis Robotic System for Non-Destructive Inspection
Designed and developed a high-precision 2-DOF robotic system with optimized mechanical architecture for automated eddy-current NDT, achieving industrial-level inspection accuracy at significantly lower cost
Train Switch Machine & Pantograph (Urban Railway Company)
Performed mechanical redesign of railway switch machines and pantographs, delivering detailed CAD models, BOMs, and manufacturing-ready documentation.


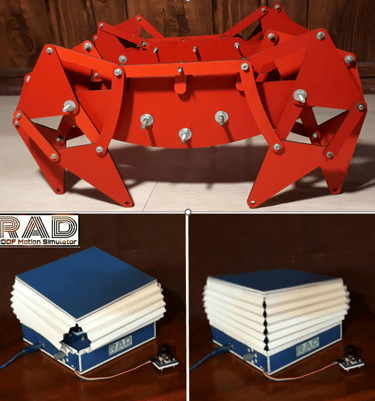
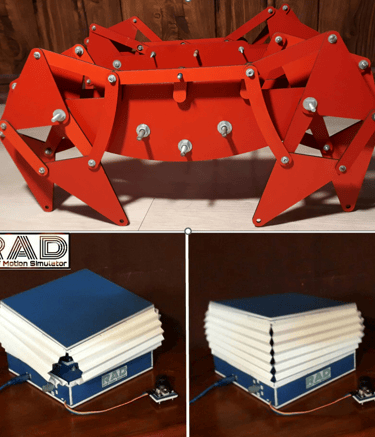
2-DOF Parallel Robot Motion Simulator
Developed a parallel robot platform capable of simulating real-world motions (e.g., driving, flight, earthquakes) using Arduino-based control.
8-Legged Bio-Inspired Walking Robot
Designed and Built a Theo Jansen-inspired walking robot capable of traversing uneven terrain through efficient mechanical linkage design and fabrication.
And Other projects ...
Back to:

