8-Legged Walking Robot
(Theo Jansen Mechanism Inspired)
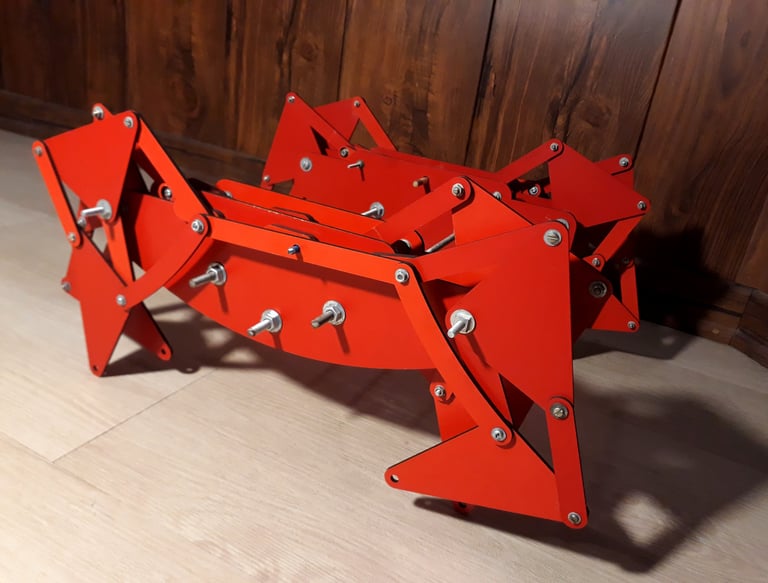
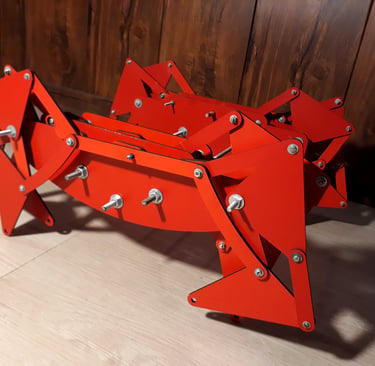
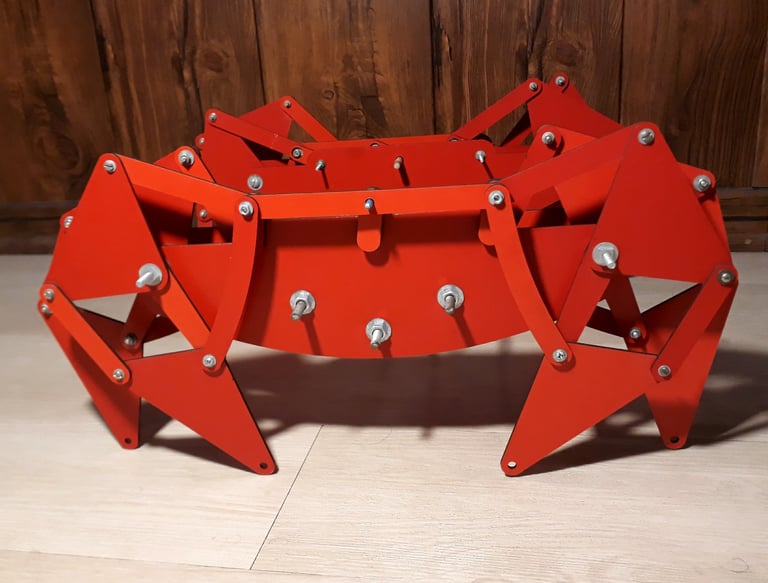
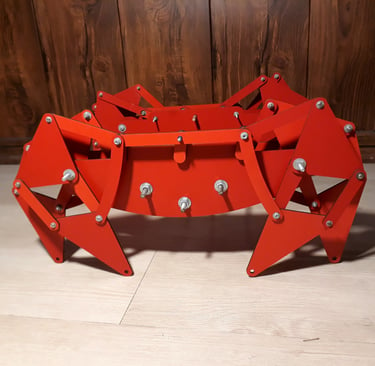
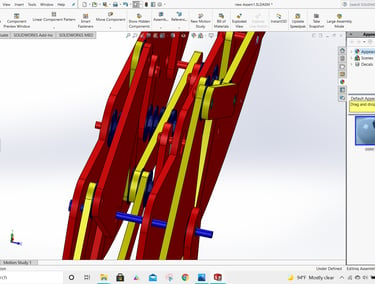
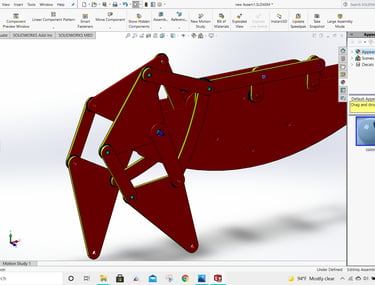
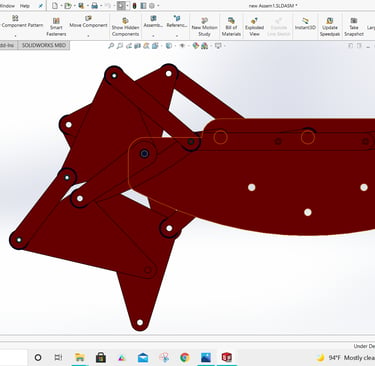
Designed and built a bio-inspired walking robot based on the Theo Jansen mechanism, capable of traversing challenging terrains such as sand and pebbles. The project emphasized efficient linkage design, mechanical robustness, and terrain adaptability, demonstrating principles of passive dynamic locomotion.
Designed and fabricated an 8-legged walking mechanism
Capable of locomotion on uneven and granular terrain
Built using laser cutting and mechanical linkage design

2-DOF Parallel Robot – Motion Simulator
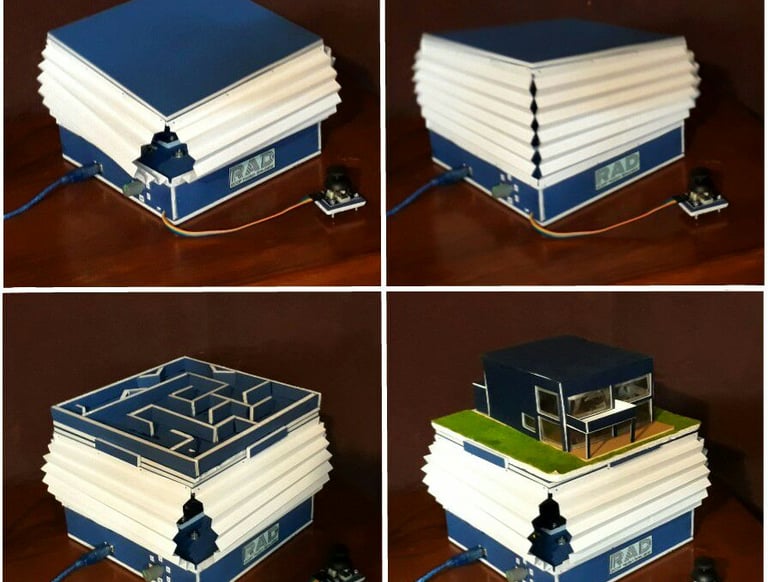
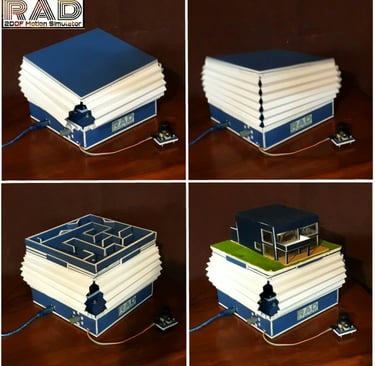
Designed, programmed, and developed a 2-DOF parallel robot capable of simulating real-world motion scenarios, including vehicle dynamics and environmental disturbances. The system combined mechanical design with embedded control, demonstrating precise motion reproduction and real-time responsiveness.
Built and programmed a parallel robot platform
Simulated motions such as driving, flying, and earthquakes
Implemented Arduino-based control and motion planning
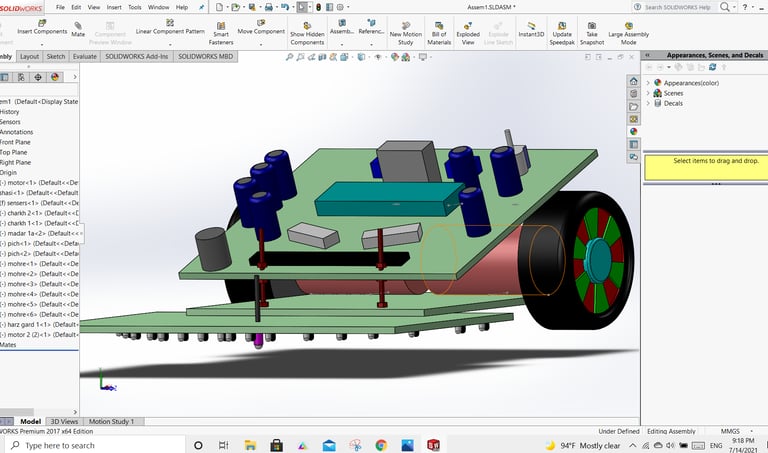
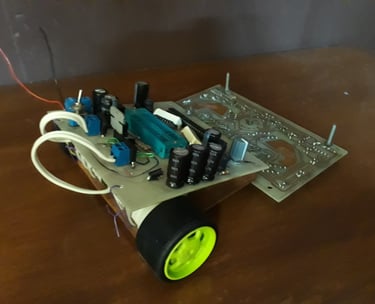
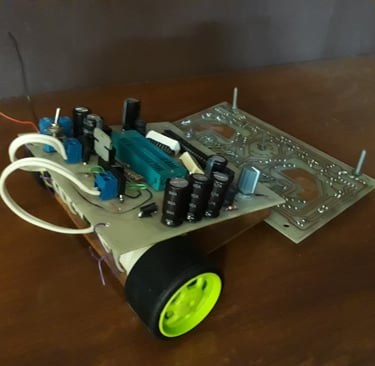
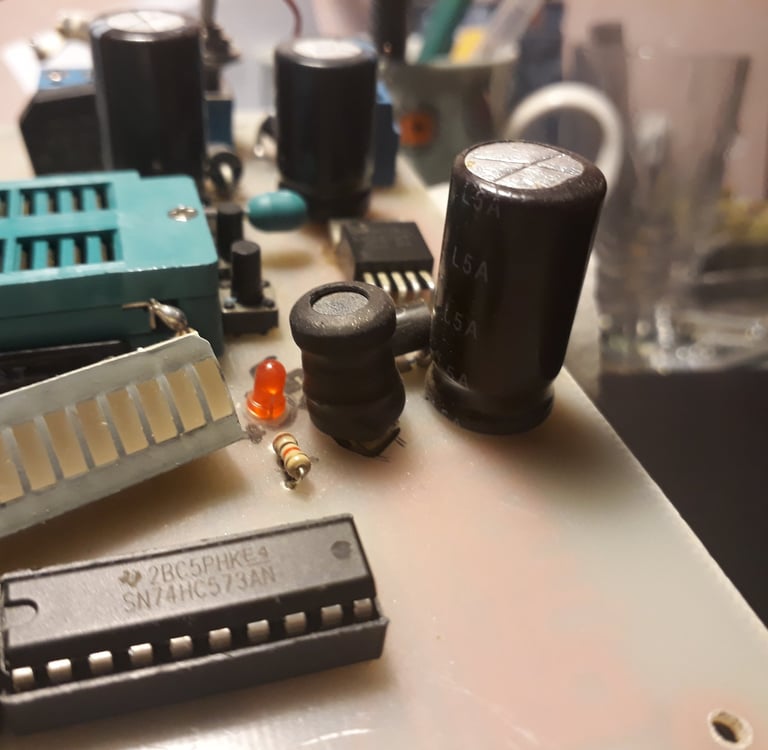
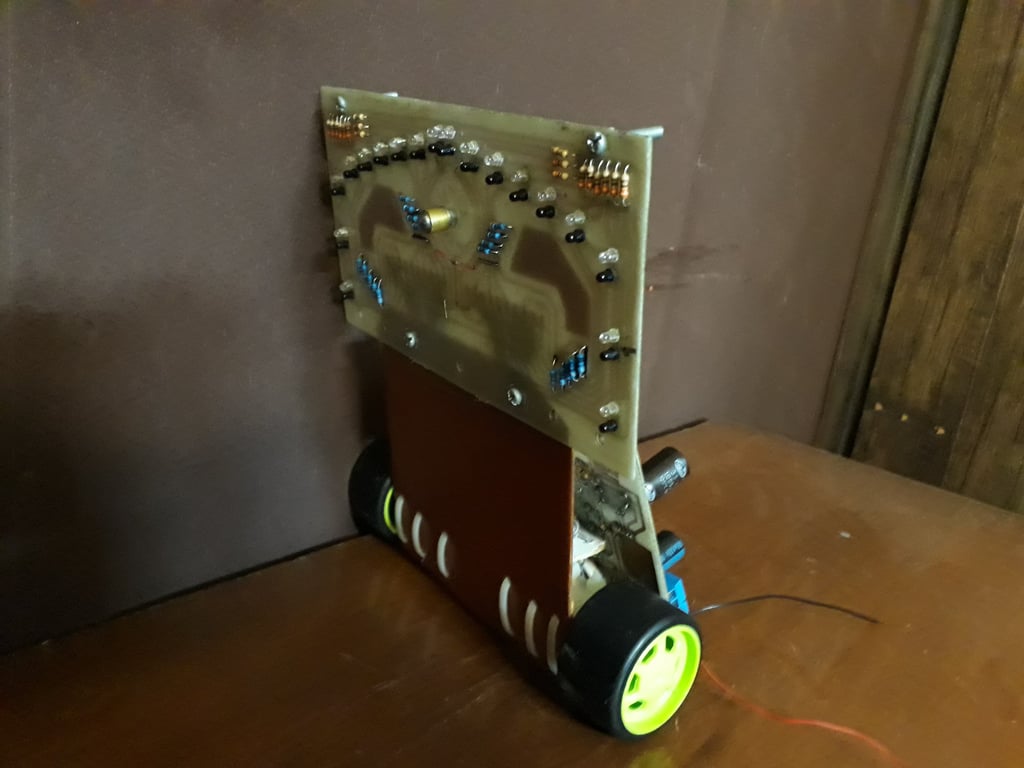
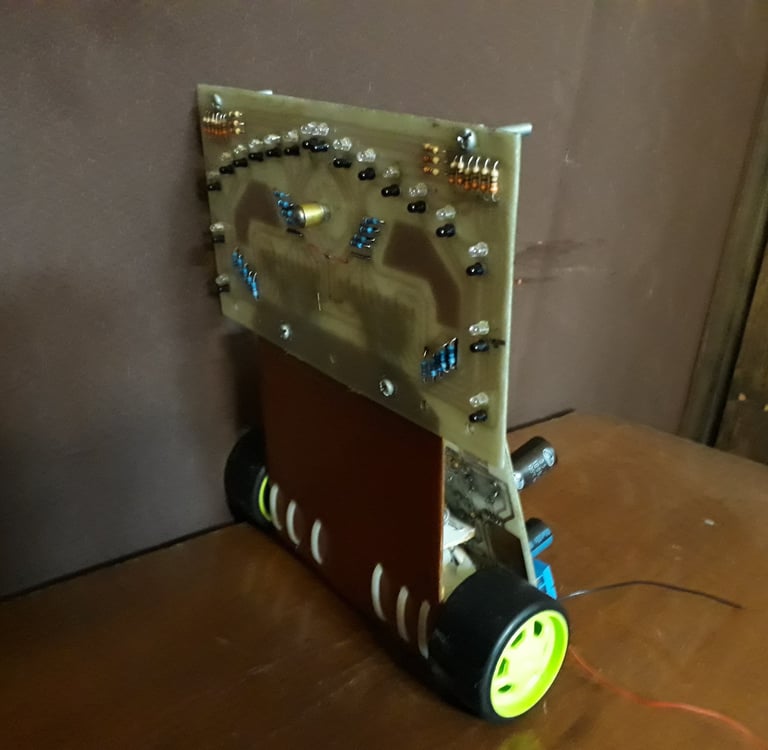
High-Speed Line Follower Robot
(18-IR Sensor Array)
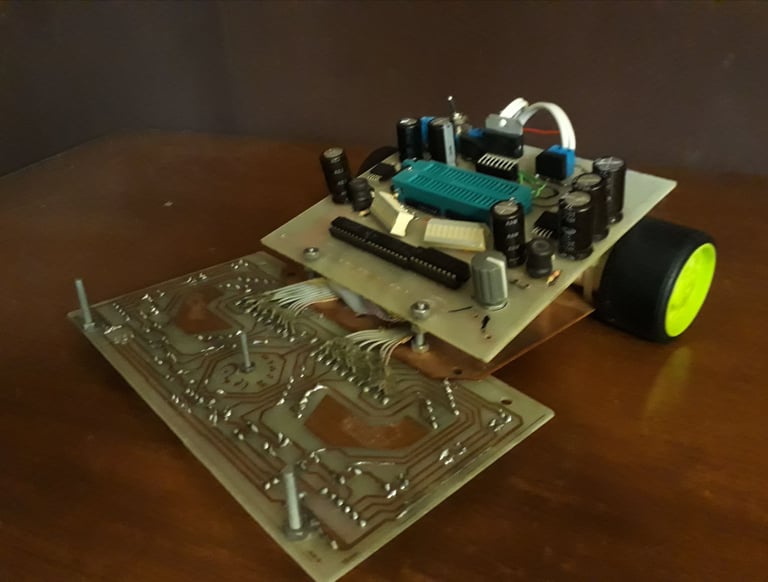
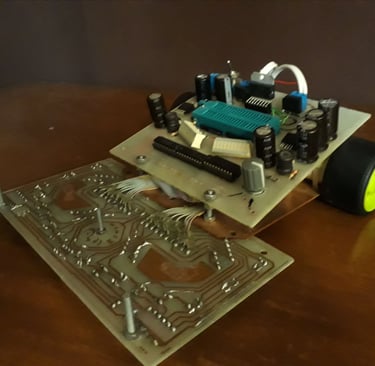
Designed and developed a high-performance autonomous line follower robot optimized for speed and precision in competitive scenarios.
Designed and integrated an 18-sensor infrared array for high-resolution path detection
Developed the complete electronic system, including sensor interfacing and motor control
Implemented optimized control algorithms for fast and accurate trajectory tracking
Tuned the system for real-time response and minimal deviation at high speeds
Outcome:
Achieved first place in a local robotics competition
Demonstrated high-speed autonomous navigation with superior tracking accuracy