Autonomous Trash Collection System for Quadruped Robots
Concept Development
Mechanical Design
Robotics Integration
Simulation & Prototyping


2024 - 2025




I designed and developed a fully functional robotics system and container mechanism for autonomous trash collection on a quadruped robot, addressing the challenges of operating in unstructured environments such as beaches, stairs, and rocky terrain.
This project was built entirely from the ground up — from initial concept generation to mechanical design, simulation, fabrication, and real-world validation.
Project Overview
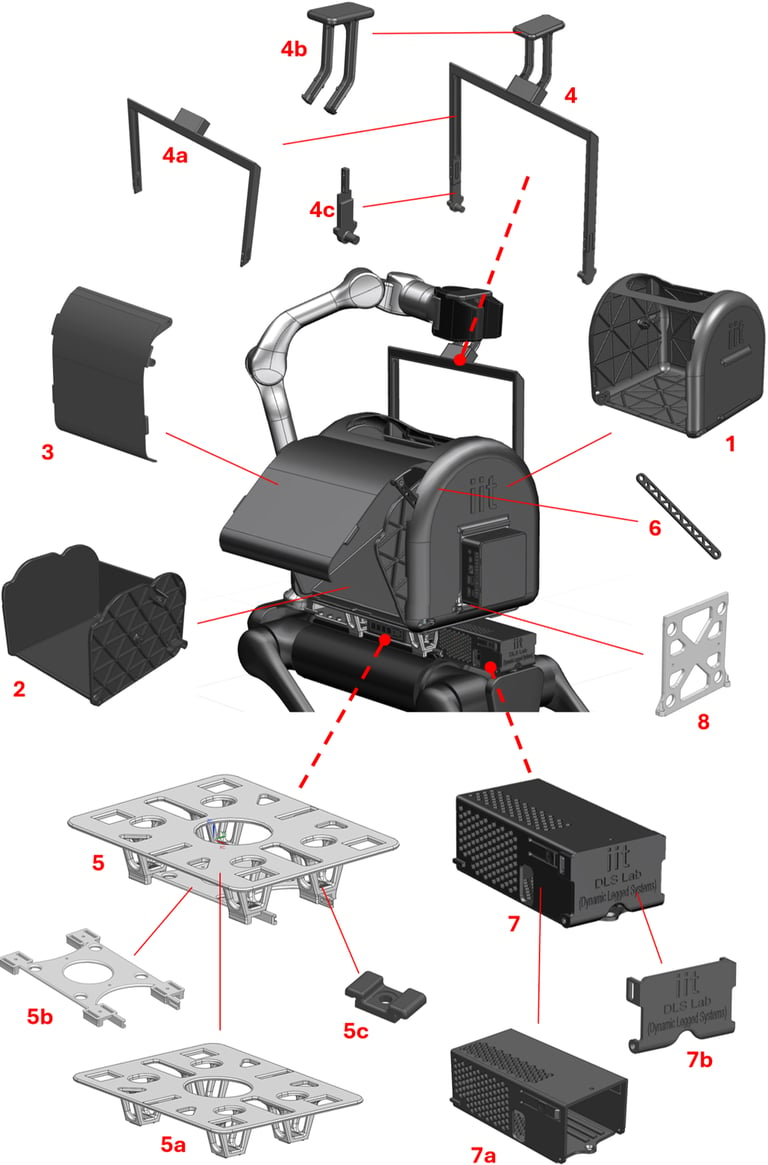
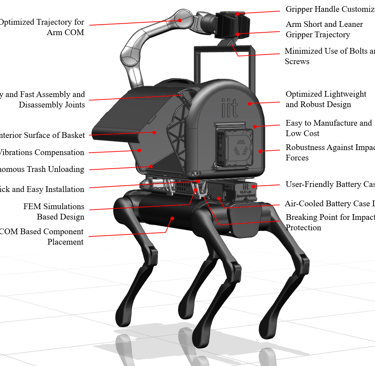
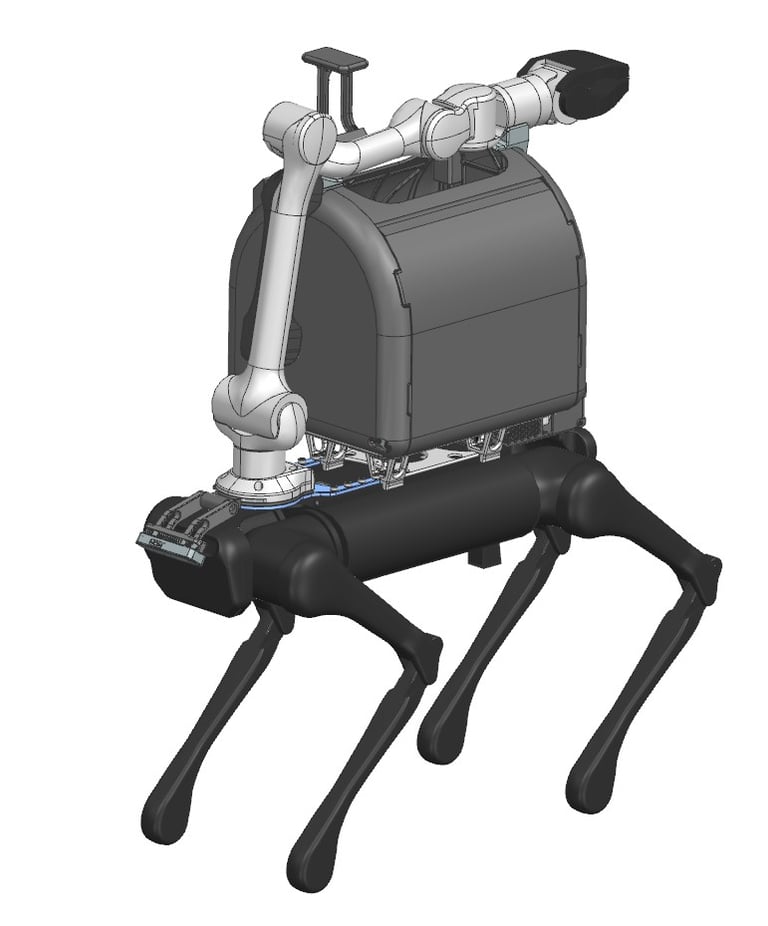
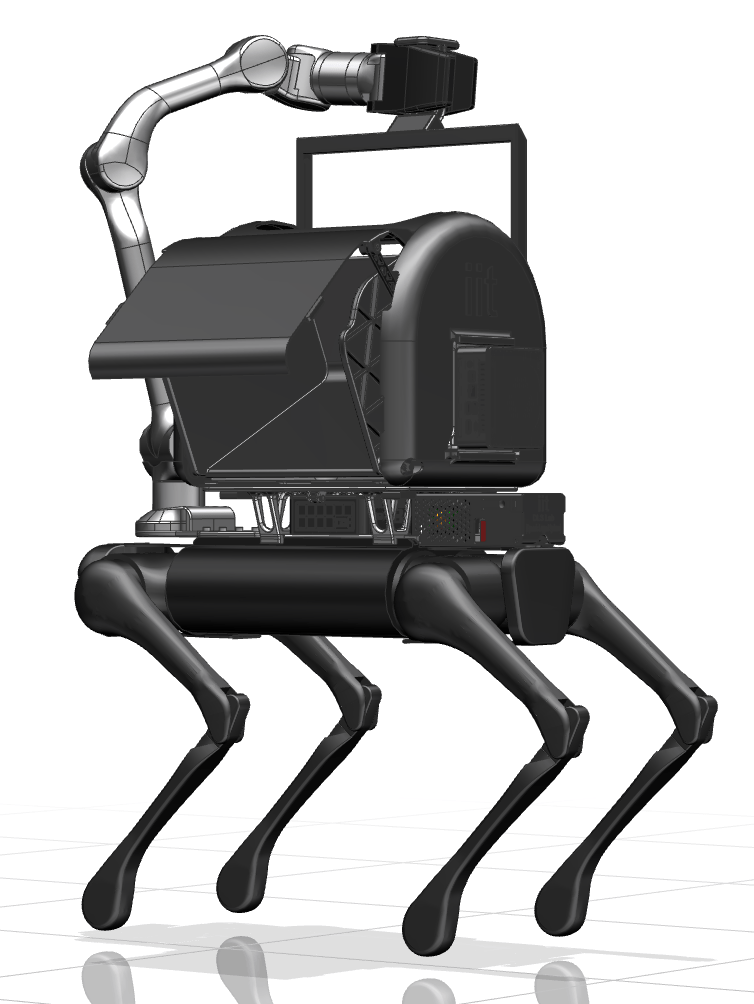
The system integrates three main components: a quadruped robot (Unitree AlienGo), a robotic arm (Unitree Z1), and a custom-designed container mechanism. The goal was to enable a fully autonomous cycle of detecting, collecting, storing, and unloading trash in challenging environments.
Unlike traditional wheeled solutions, this system leverages the mobility of legged robots, requiring a completely new approach to mechanism design and system integration.


End-to-End Mechanical Design
Defined system requirements based on payload, terrain, and autonomy constraints
Generated multiple conceptual mechanisms and performed structured design selection
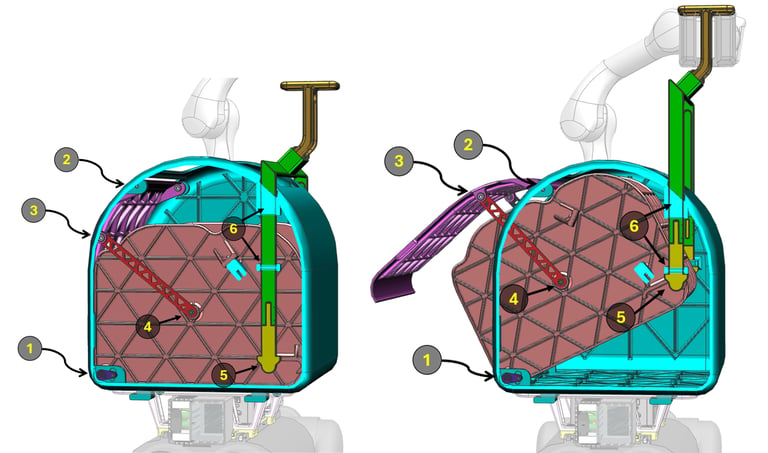
Developed the final mechanism entirely in CAD (Siemens NX), optimizing for weight, robustness, and manufacturability
Simulation & Engineering Validation
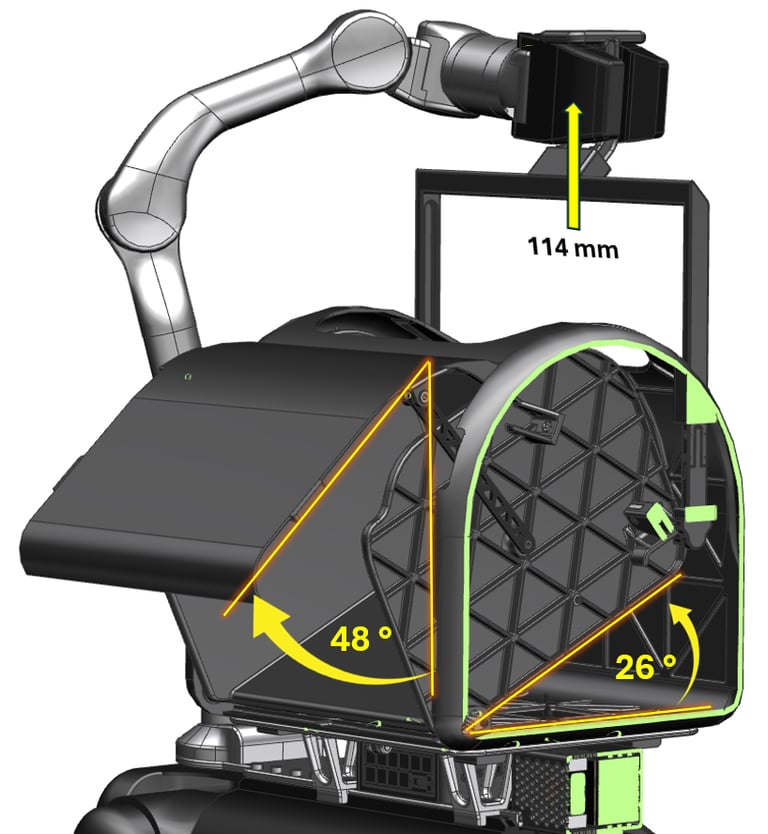
Performed motion simulations to analyze joint forces and optimize geometry
Conducted FEM analysis to ensure structural integrity under real-world loads
Prototyping & Manufacturing
Designed all components for 3D printing (SLS, ABS, AL 7075 material)
Optimized parts for lightweight construction while maintaining durability
Ensured ease of assembly and low-cost manufacturing
System Integration
Integrated the mechanism with a quadruped robot and robotic arm
Designed for center-of-mass balance and vibration resilience during locomotion
Implemented features such as magnetic stabilization and passive reset via gravity
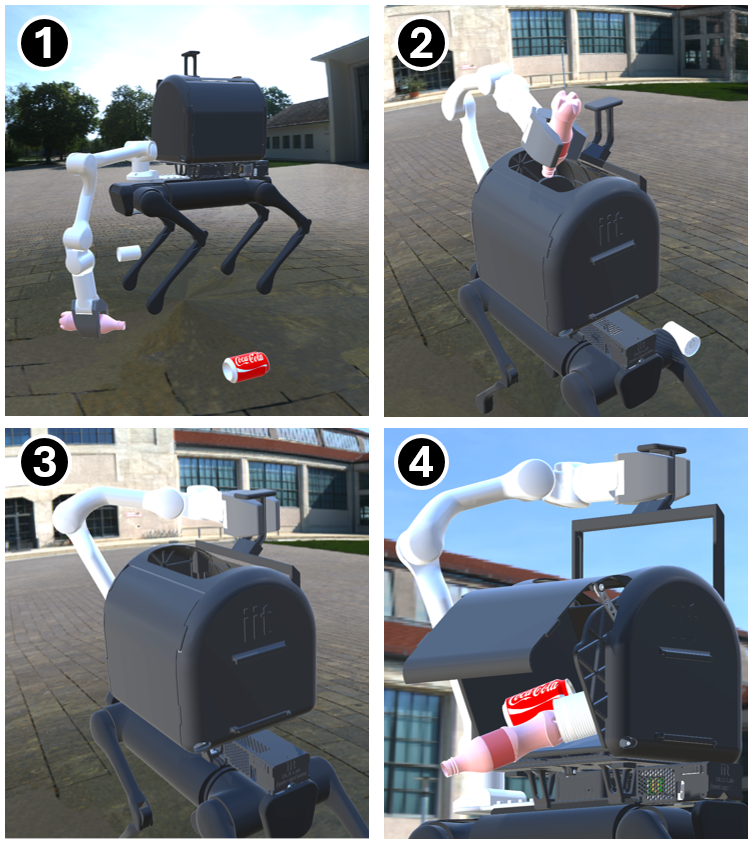
Experimental Validation
Tested full operation cycle: pick → store → unload
Verified robustness under dynamic robot motion (walking, rotations)
Demonstrated stable performance with no failure or excessive vibration
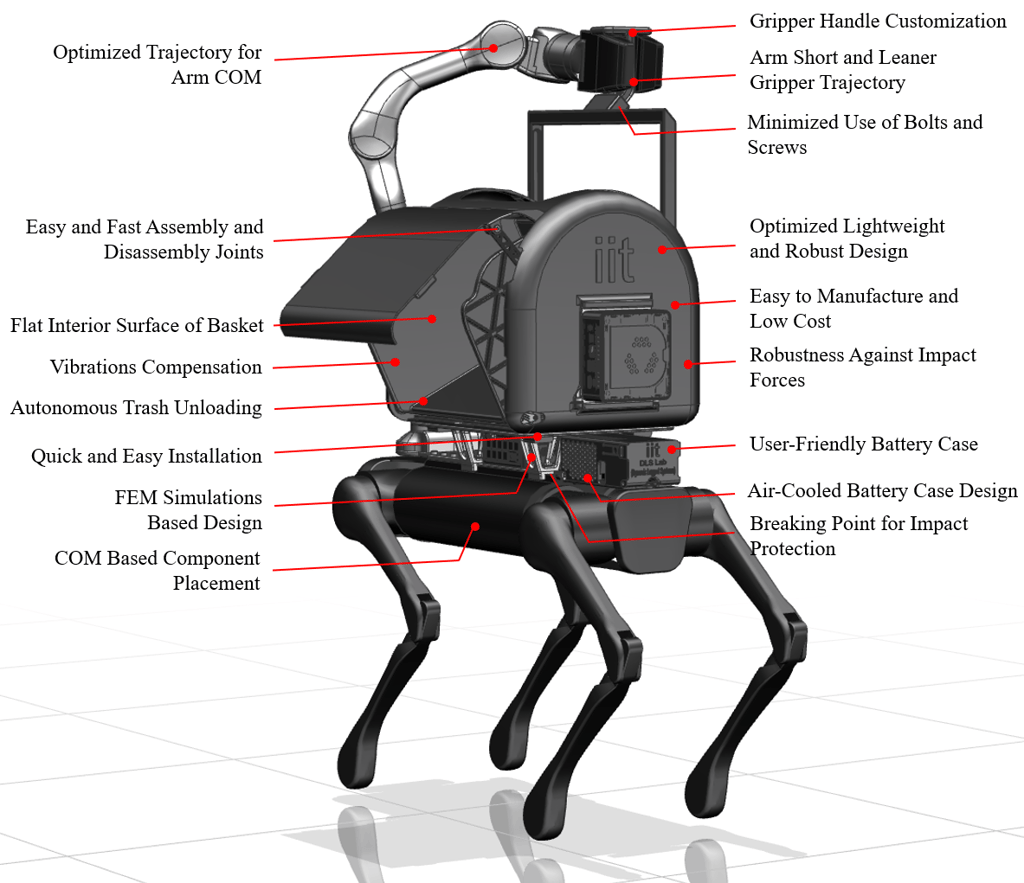
Key Features
Fully Autonomous Unloading – No additional actuators required
Lightweight & Robust Design – Optimized for legged robot payload constraints
Impact Protection Mechanism – Sacrificial components to prevent costly damage
Vibration-Resistant System – Stable during dynamic locomotion
Modular & Easy Assembly – Designed for rapid deployment and maintenance
Efficient Kinematics – Simplified linear motion for reliable robotic manipulation
Outcome
The final system successfully demonstrates a novel approach to integrating mechanical design with legged robotics for environmental applications. Real-world testing confirmed seamless interaction between the robot, arm, and container, validating both the design methodology and system performance.