My Projects at FUM Robotics Lab

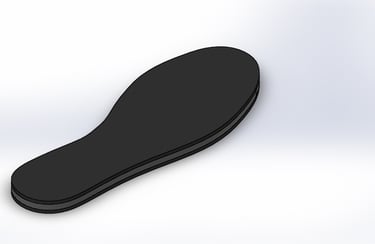
Lower-Limb Rehabilitation Exoskeleton (FUM Robotics Lab)


Type: Medical Robotics
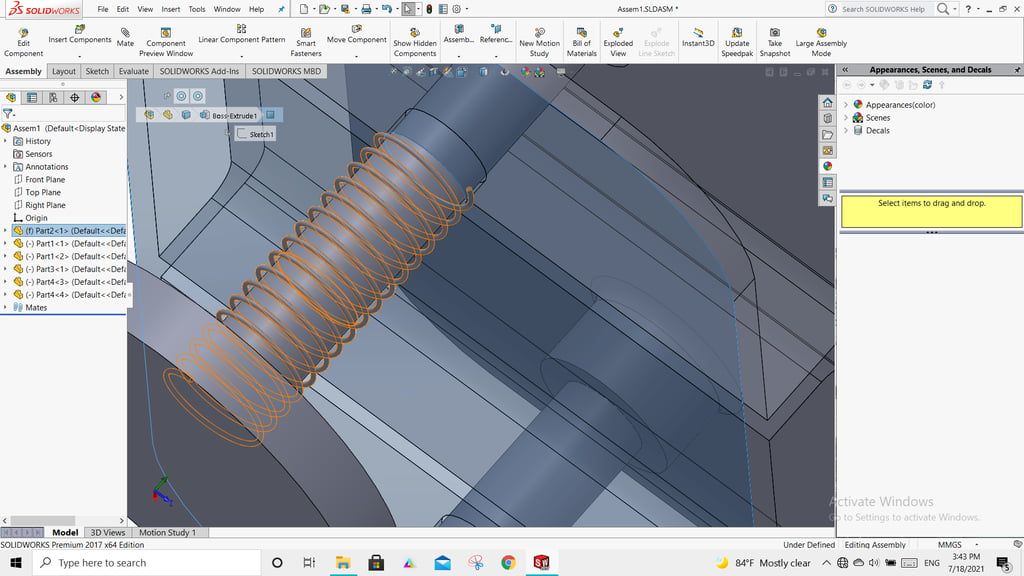
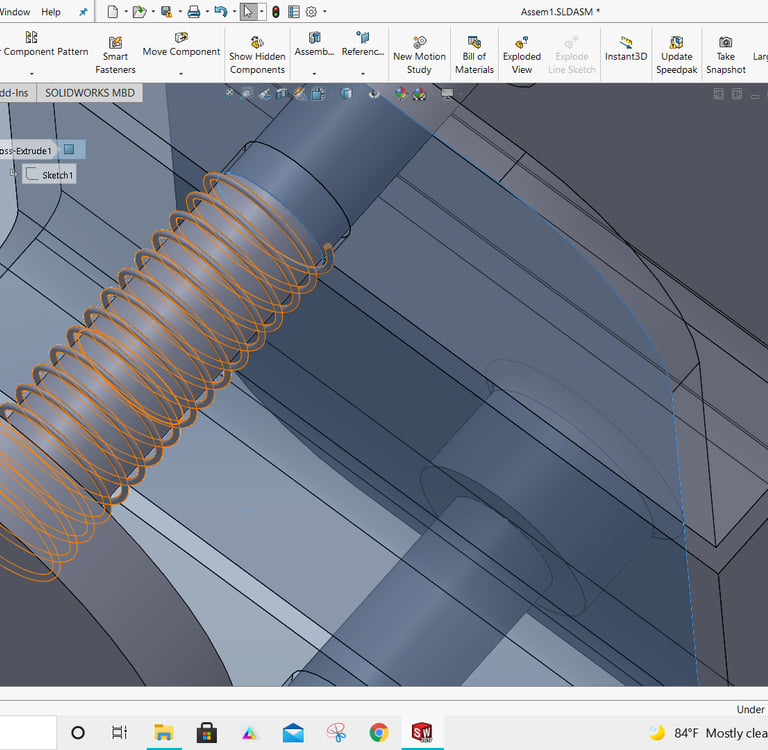
Designed and simulated mechanical components of a rehabilitation exoskeleton
Performed mechanical simulations and dynamic analysis
Contributed to assistive robotics for human mobility
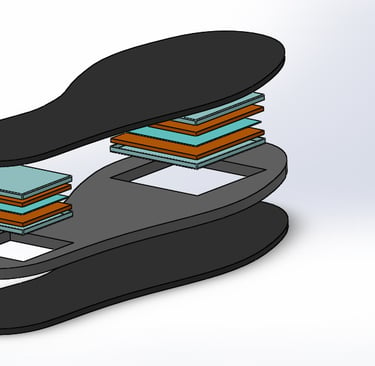
Developed mechanical components for a lower-limb rehabilitation exoskeleton aimed at assisting human mobility. The project focused on biomechanical compatibility, structural integrity, and smooth motion transfer. Through simulation-driven design, the system achieved improved safety and performance, contributing to advanced assistive robotics solutions.
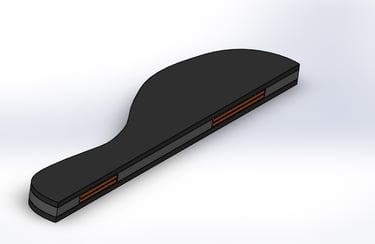
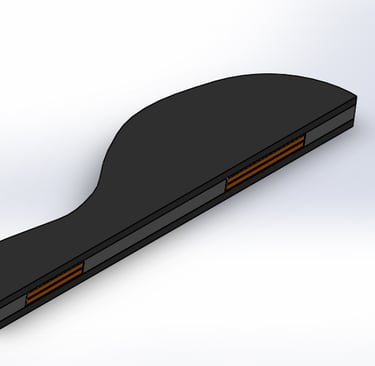
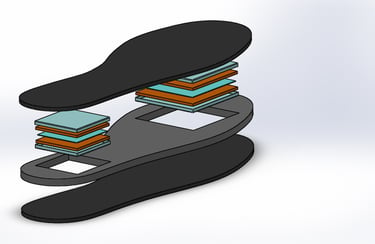

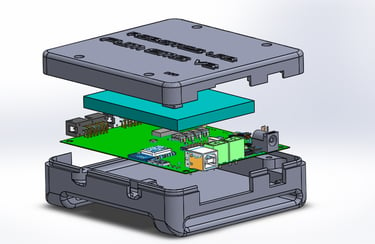
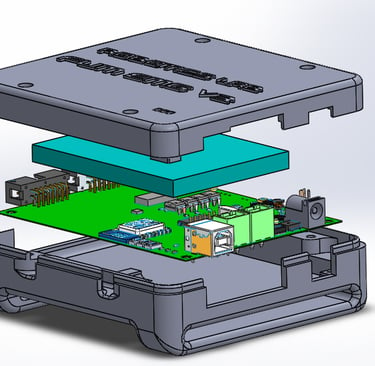
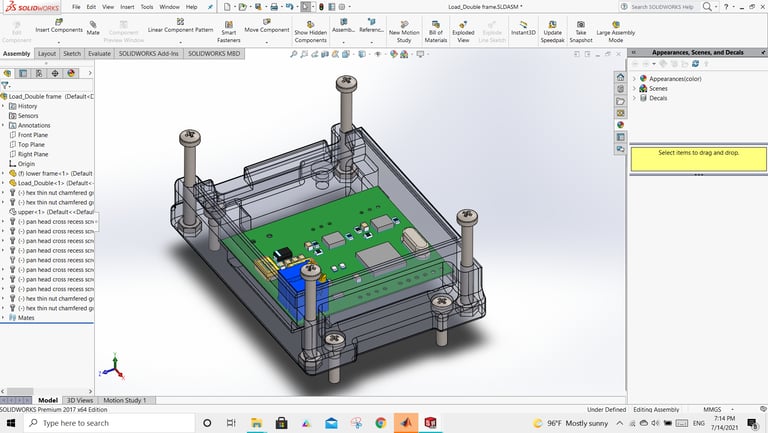
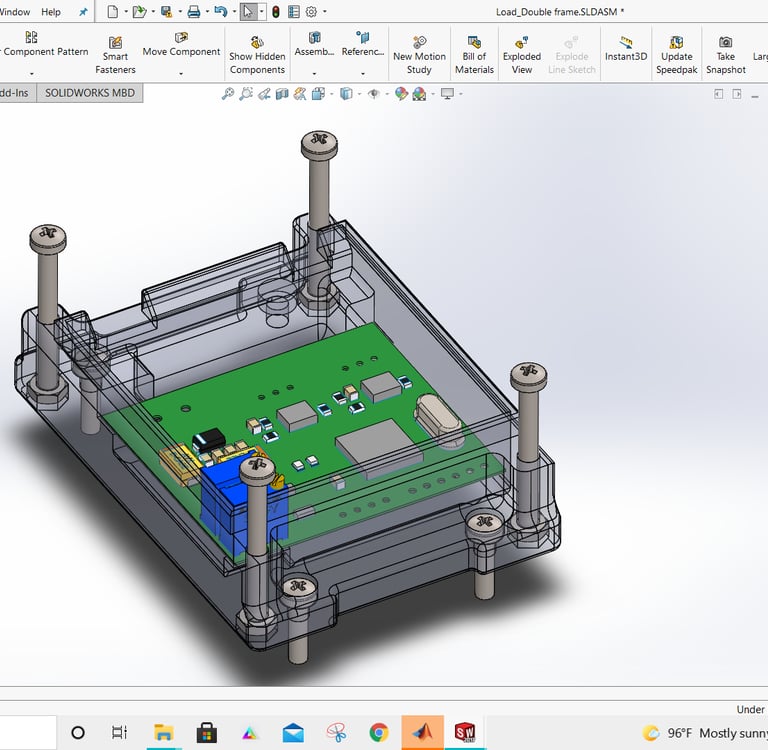
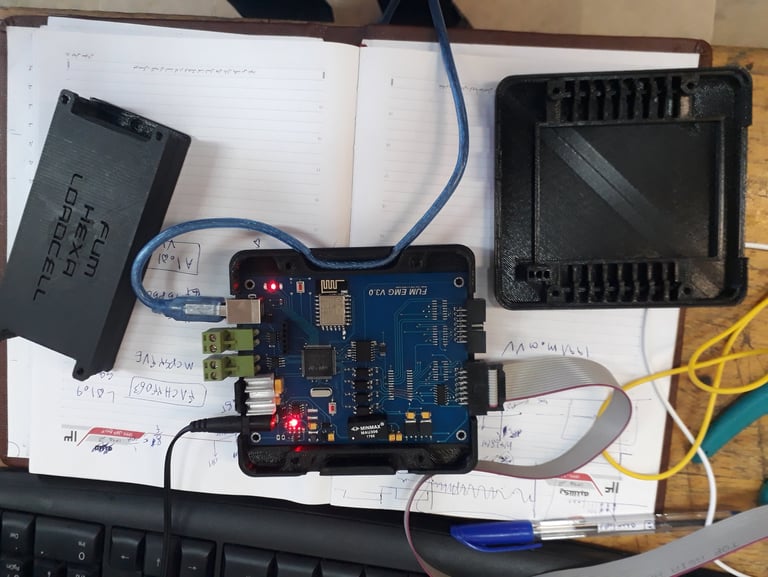
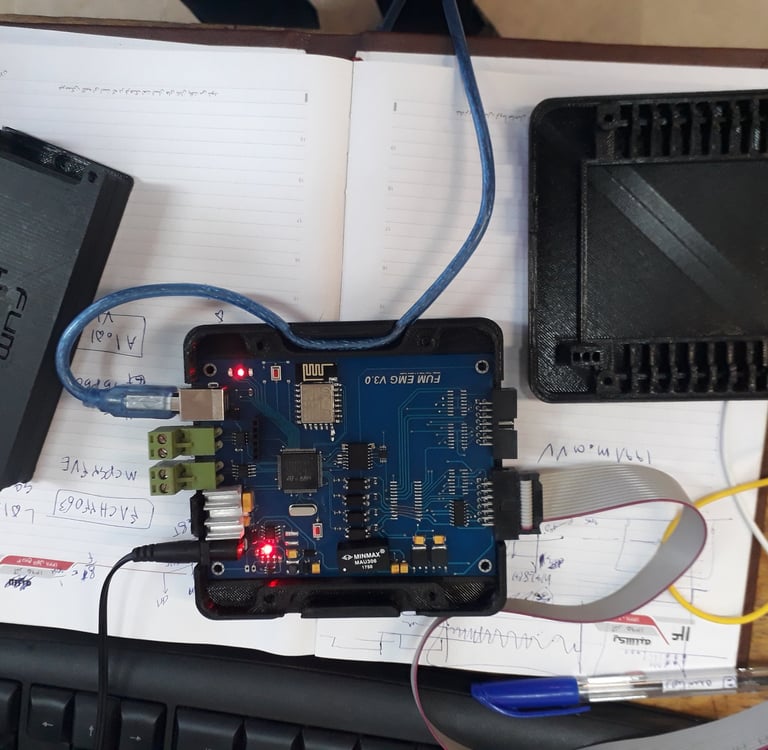
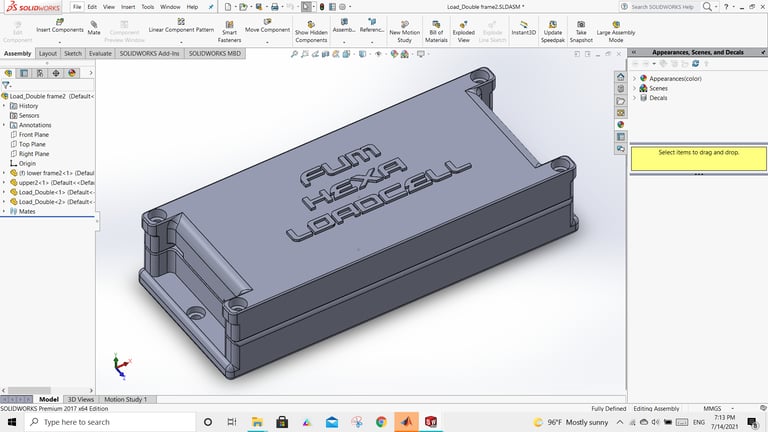
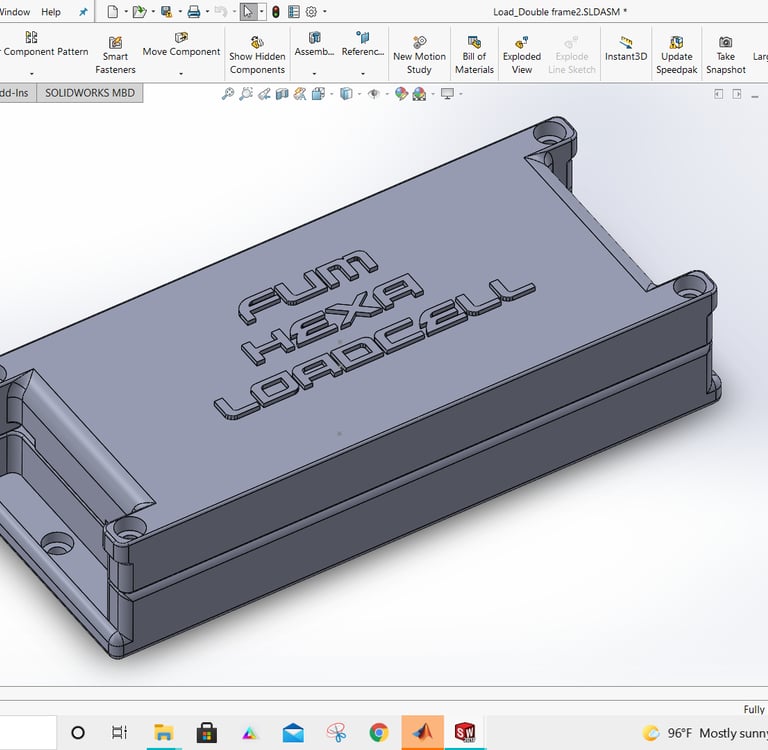
EMG Sensor Mechanical Structure
Type: Mechatronics / Biomedical
Designed and fabricated a mechanical housing for EMG sensors
Used 3D printing for prototyping
Focused on compactness and usability
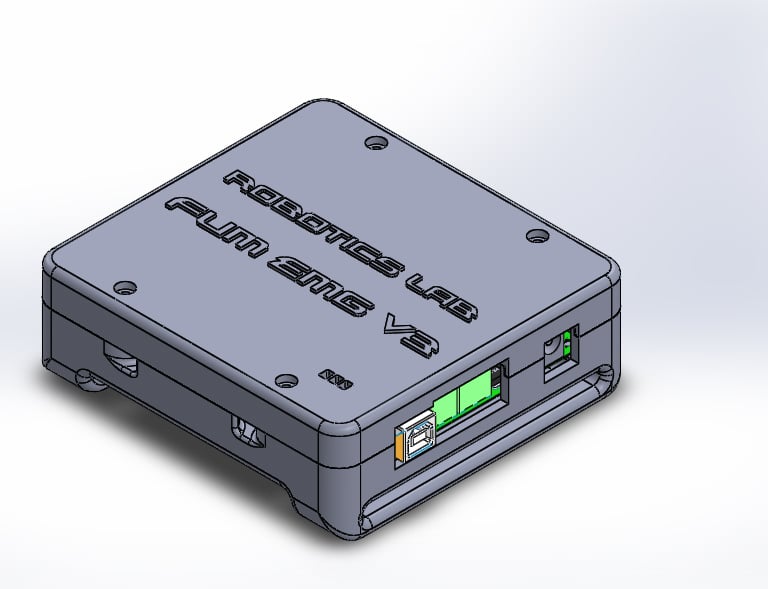
Designed a compact and ergonomic mechanical structure for EMG sensors, enabling reliable signal acquisition in wearable systems. The design emphasized durability, user comfort, and integration with electronic components, resulting in a practical solution for biomedical and human-machine interface applications.


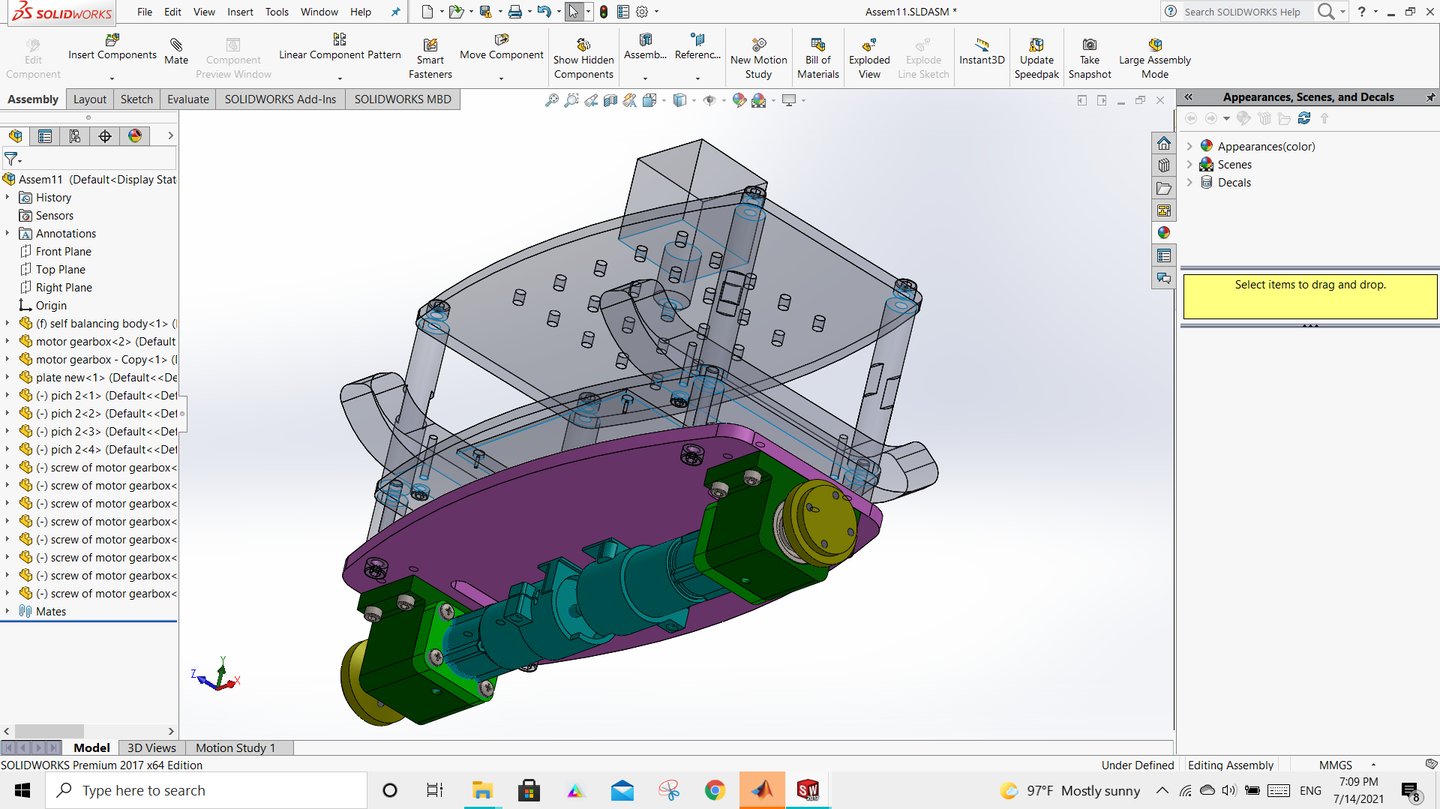
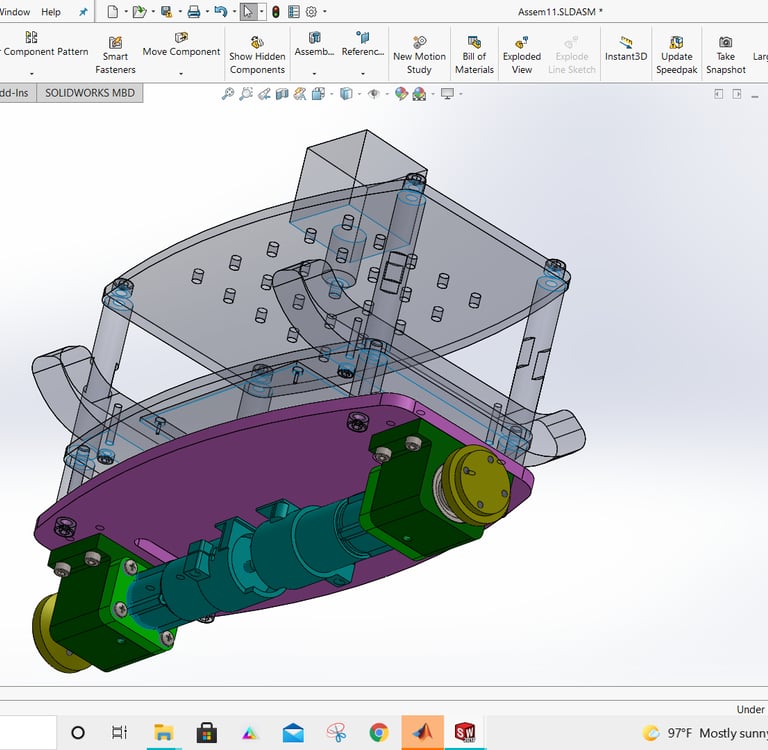
Two-Wheeled Self-Balancing Robot
Type: Robotics
Designed and modeled a self-balancing robot system
Conducted dynamic analysis and simulation
Focus on stability and control behavior
Designed and analyzed a two-wheeled self-balancing robot, focusing on system dynamics, stability, and control. The project involved full 3D modeling and simulation to evaluate real-time balancing behavior. It demonstrated strong integration of mechanical design with control principles in robotics.