5-DOF Passive Arm for Collaborative Payload Transport on Quadruped Robots
Featuring adjustable joint stiffness and damping mechanisms


2025 - 2026
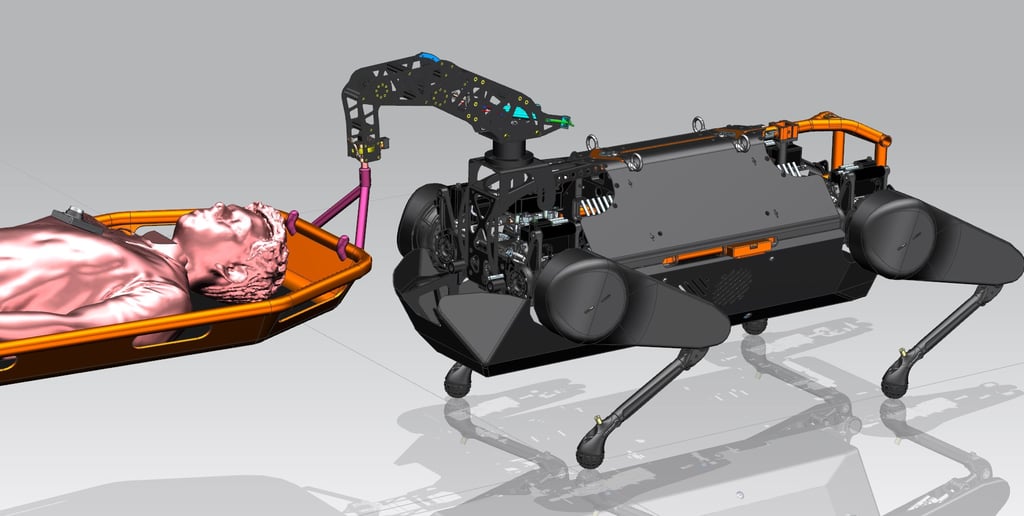
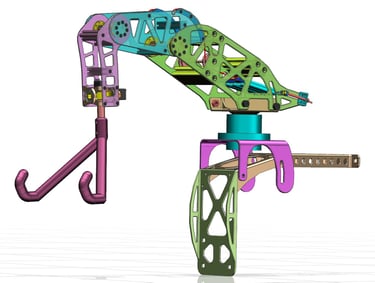
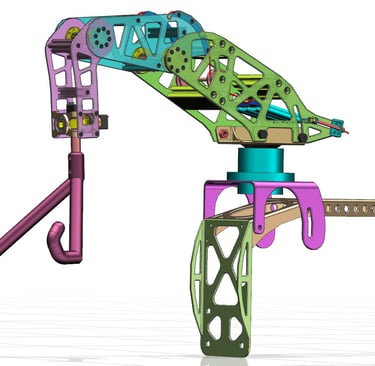
I designed and developed a 5-DOF passive robotic arm integrated with the HyQReal 2 quadruped robot, aimed at enabling efficient collaborative payload transport between two robots.
This project explores a minimalist yet highly effective mechanical approach to multi-robot cooperation, where intelligence is partially embedded in the structure itself rather than relying solely on complex control strategies.
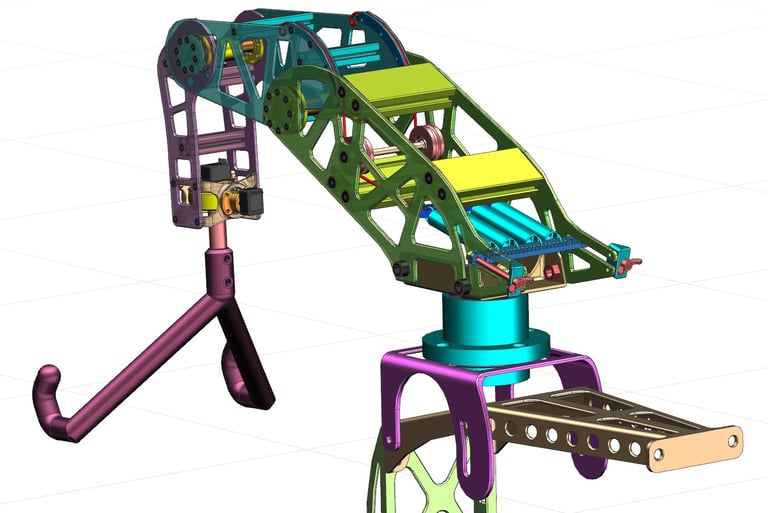
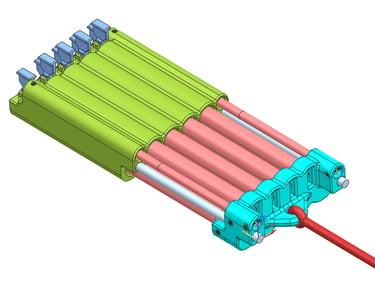
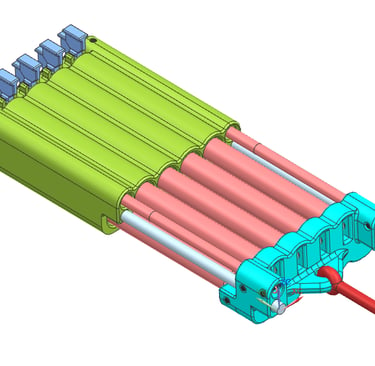
The arm is based on the principle of intrinsic mechanical impedance, featuring adjustable joint stiffness and damping mechanisms. These allow the system to passively adapt to interaction forces during cooperative tasks, improving robustness, safety, and energy efficiency in scenarios such as robot-robot and human-robot payload carrying.
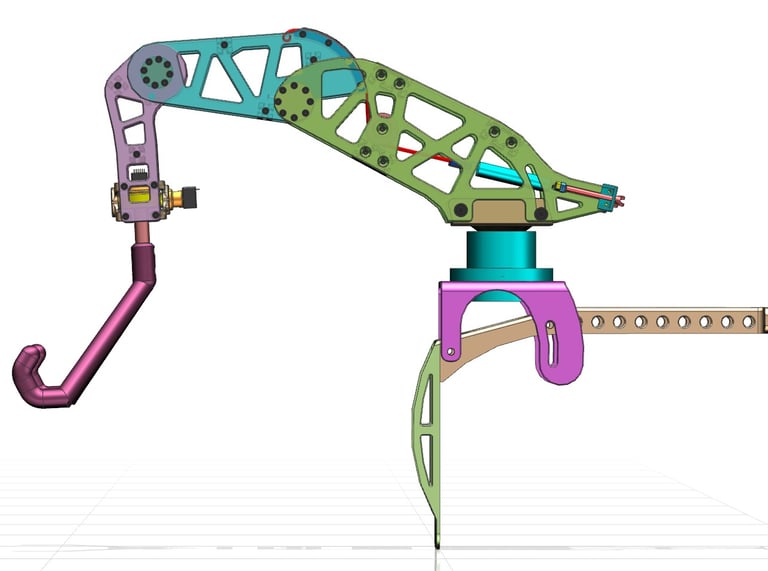
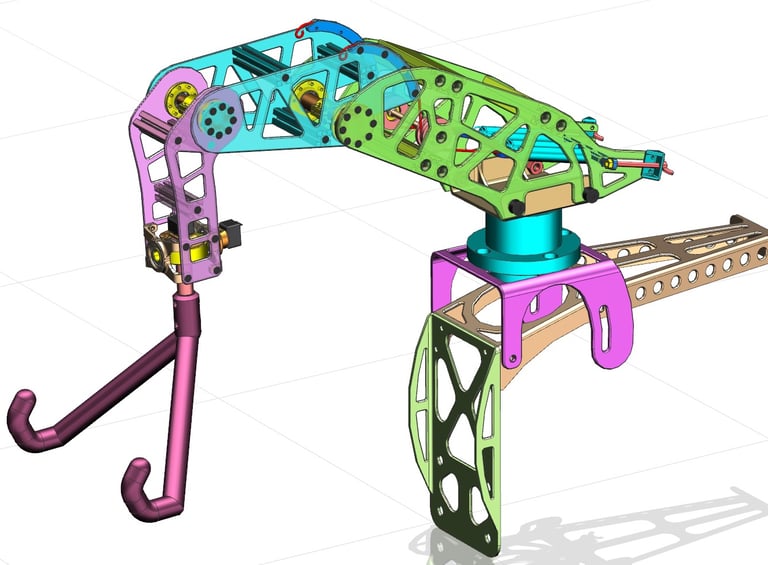
A key design focus was modularity. Each link and joint is independently manufacturable and easily assembled, enabling rapid prototyping, maintenance, and scalability. Despite its lightweight construction, the arm maintains high structural strength, making it suitable for handling heavy loads in dynamic environments.


To validate the design, I performed motion simulations and dynamic analysis, evaluating how different stiffness and damping configurations influence system behavior during collaborative transport tasks. The results demonstrate that passive compliance can significantly enhance coordination between agents while reducing control complexity.

