
HyQ Real Robot — Development, Assembly, and System Integration


2023 - Present


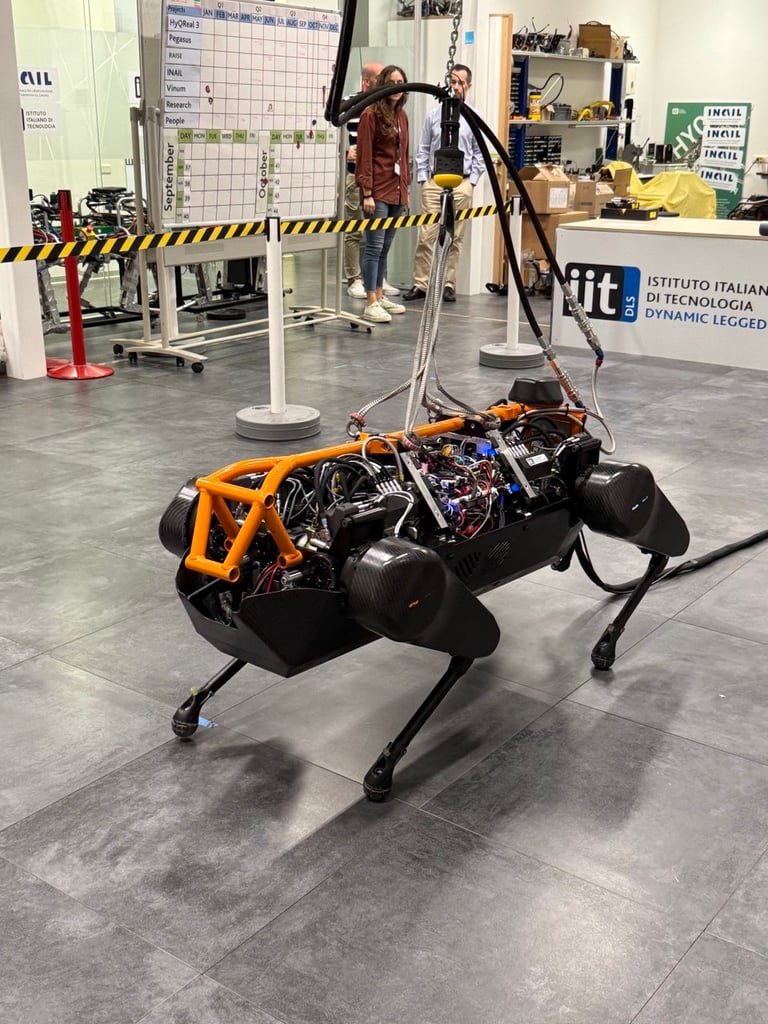
Since joining the Dynamic Legged Systems (DLS) Lab at the Italian Institute of Technology, I have been deeply involved in the development, maintenance, and continuous improvement of the HyQ Real quadruped robot platforms (HyQ Real 1, 2, and 3).
My work spans hands-on mechanical engineering, system integration, and iterative design improvements on one of the most advanced quadruped robotic systems developed at IIT.


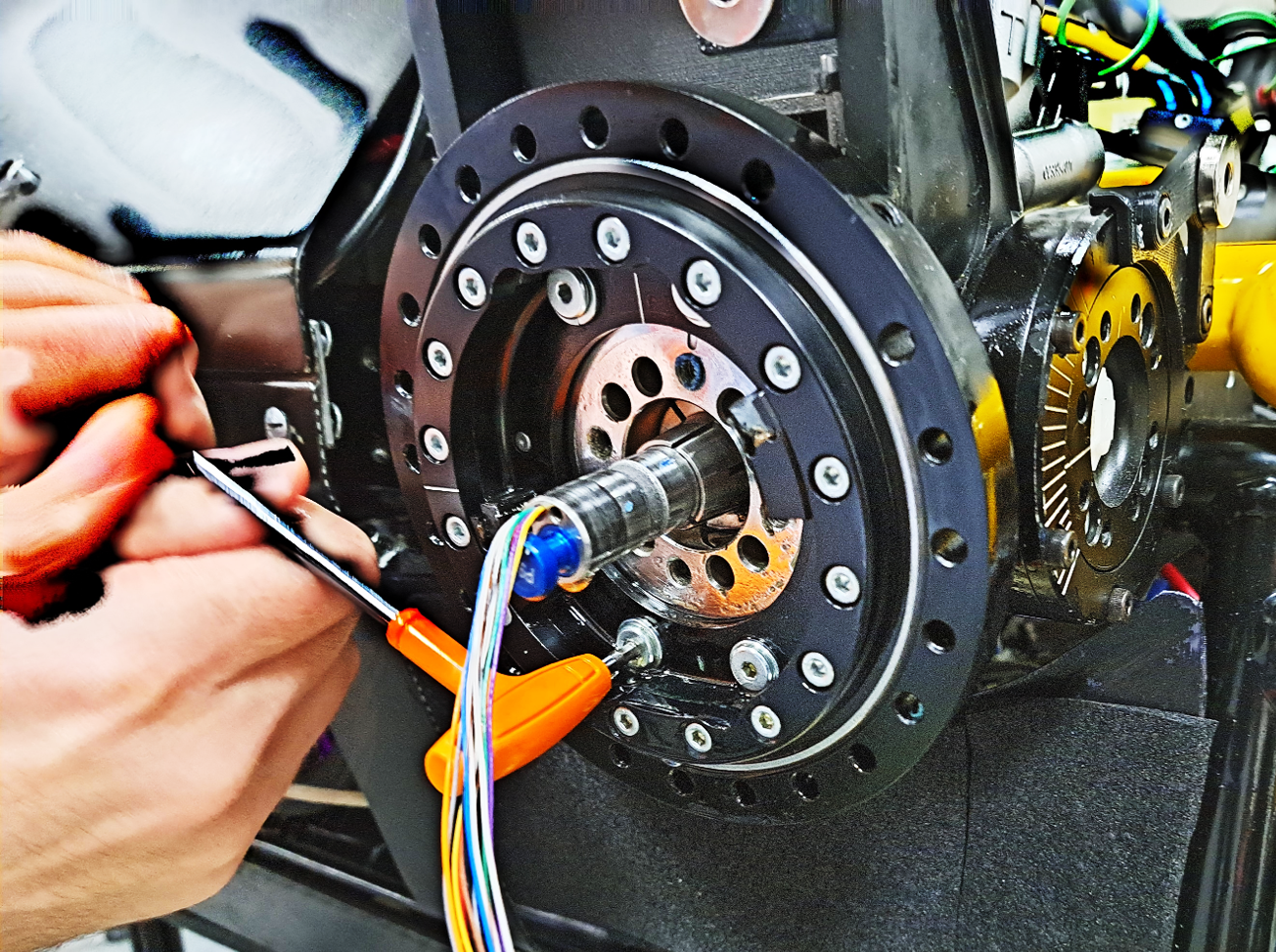
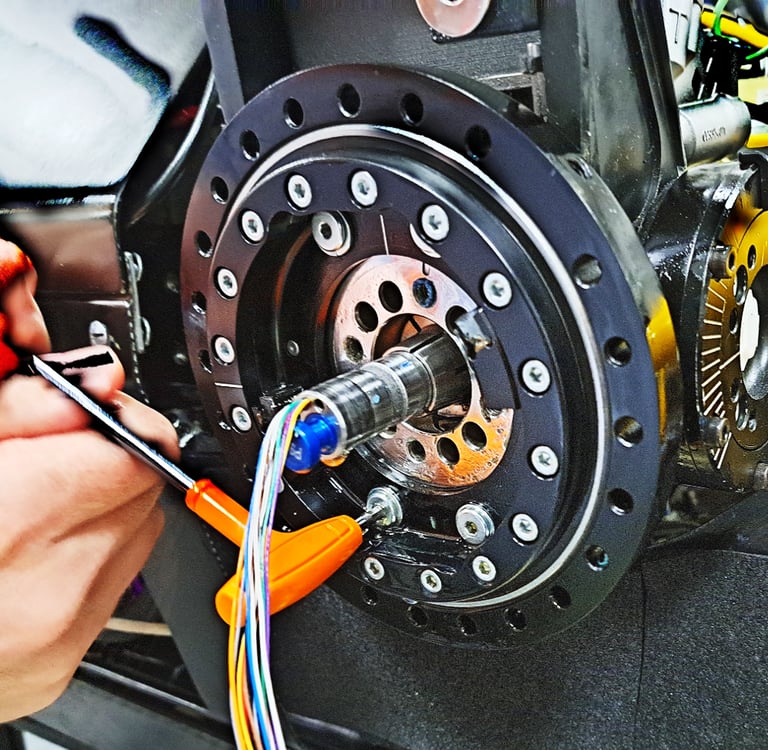
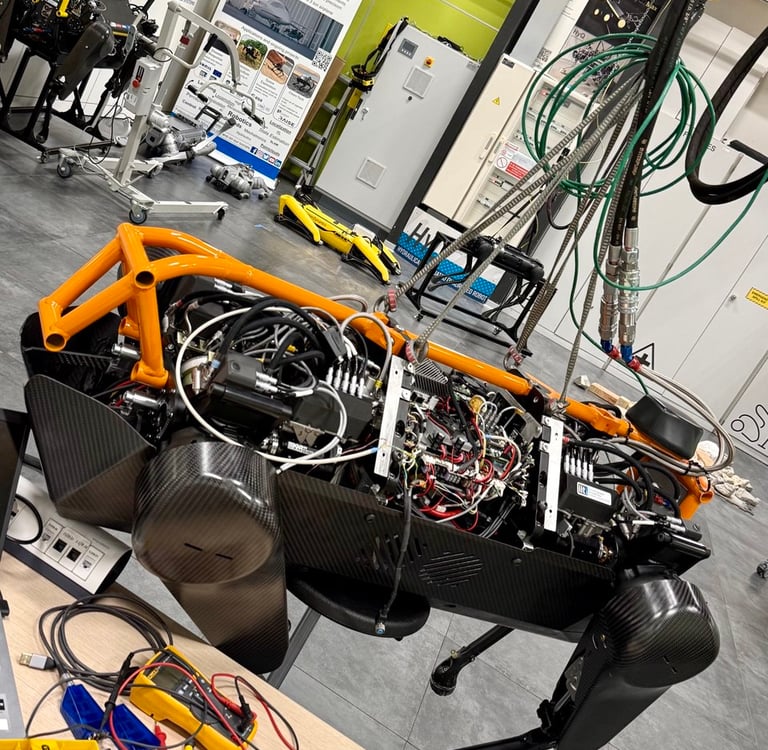
A significant part of my contribution has been focused on HyQ Real 3, where I played a key role in the complete mechanical assembly of the robot’s legs and actuators, including internally designed actuation systems. This involved precise assembly and integration of components to ensure reliability and optimal performance.
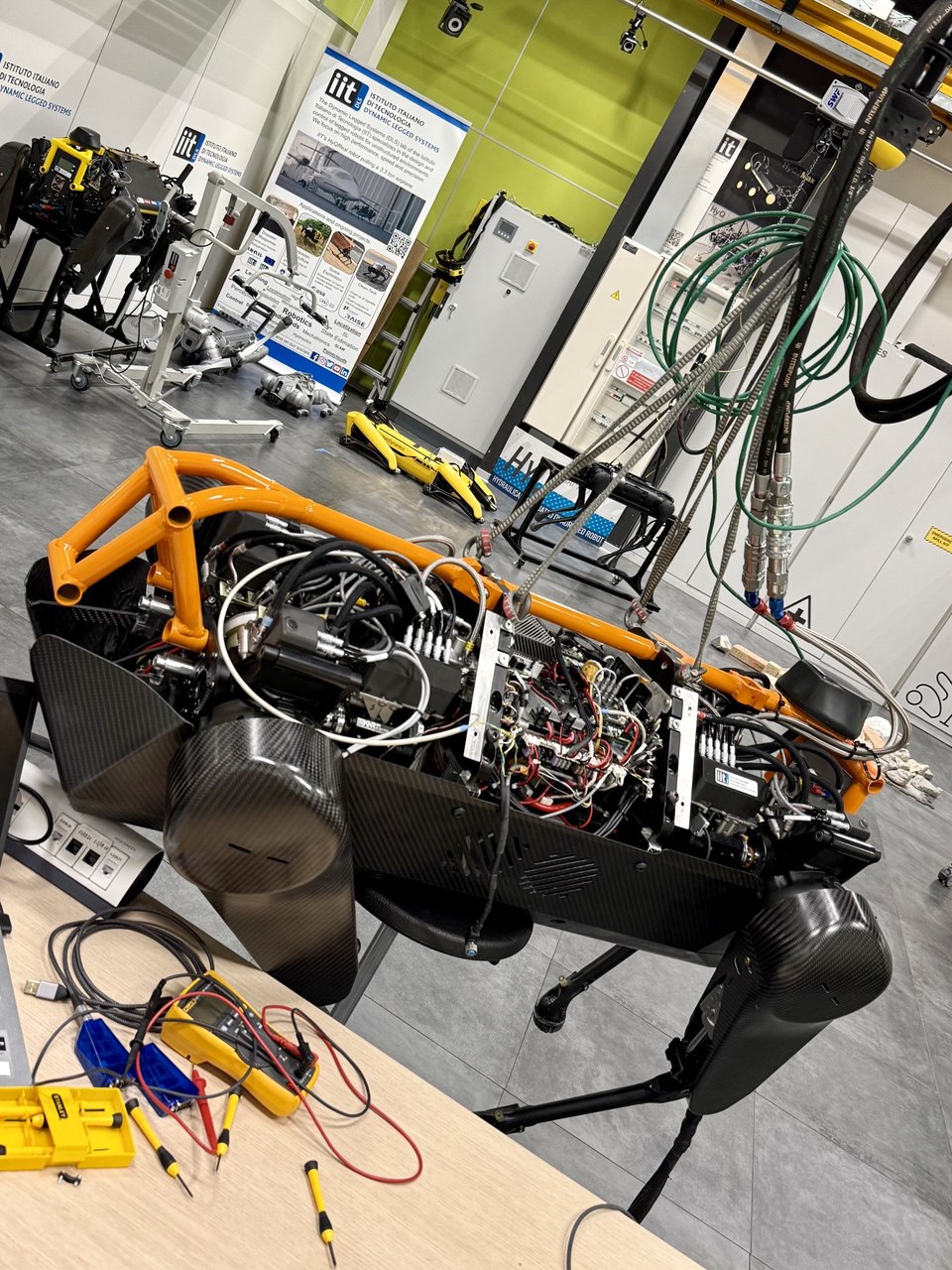
Beyond assembly, I actively contributed to experimental validation and testing of the leg systems, supporting test campaigns, troubleshooting issues, and refining system behavior under real-world conditions. My role required strong hands-on problem-solving.
I have also been responsible for extensive maintenance and hardware upgrades across all HyQ platforms. This included diagnosing failures, repairing critical components, and replacing sensitive elements such as torque cells and structural parts, ensuring the robots remained fully operational for research and testing activities.
In parallel, I introduced and implemented design improvements and custom mechanical solutions. I also developed additional “on-top” mechanical and system-level features to support ongoing research needs.
Overall, my work on the HyQ platforms reflects a strong emphasis on:
Full-cycle mechanical assembly and integration
Actuator and leg system assembly
Experimental testing and validation
Maintenance and rapid troubleshooting
Design optimization and hardware improvements
This experience has strengthened my expertise in real-world robotic systems, where precision engineering, reliability, and iterative development are critical.

