Autonomous Ground–Aerial System for Post-Earthquake Structural Assessment

This project focuses on developing an integrated robotic system for safe and efficient post-earthquake inspection of complex historical structures, with a particular emphasis on churches. These environments present unique challenges due to fragile architectural elements, large vaulted spaces, and high risk for human operators.
The system combines ground robotics and aerial drones into a coordinated workflow that enables high-resolution data acquisition while minimizing human exposure to hazardous conditions.


2024 - 2025


Key Contributions
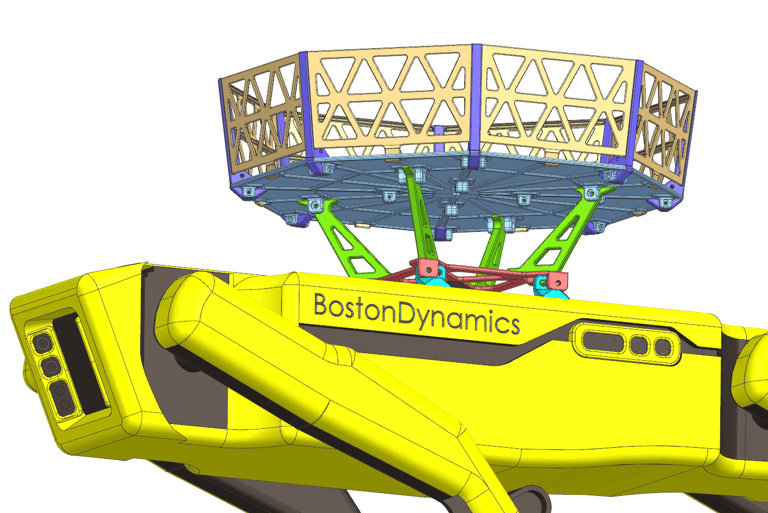
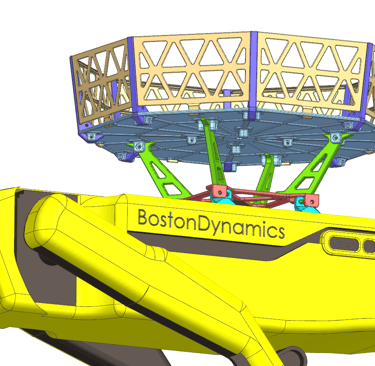
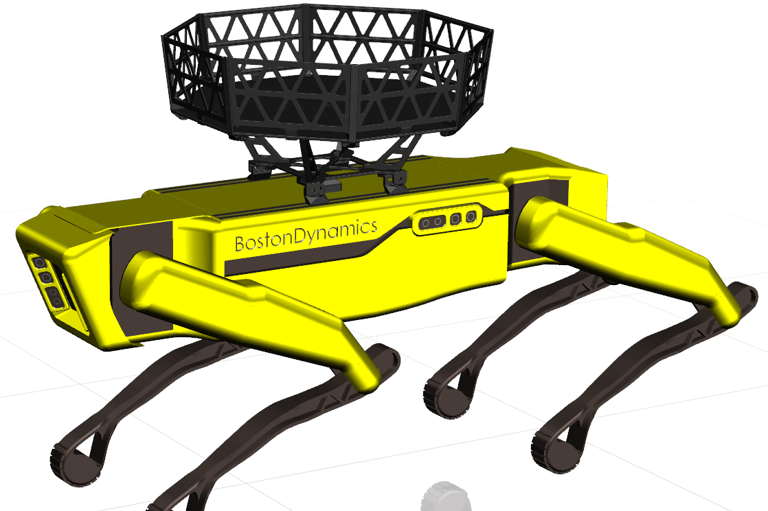
Designed and engineered a modular drone landing platform for the Boston Dynamics Spot quadruped robot, enabling reliable UAV deployment in challenging terrains.
Optimized the platform for structural strength, lightweight performance, and vibration resistance.
Integrated a high-friction landing surface and protective walls to ensure drone stability during robot locomotion, including stairs and uneven debris.
Ensured collision-free operation by carefully positioning the platform relative to the robot’s kinematics.
Developed a modular and maintainable design, allowing rapid replacement of components in field conditions.
Write your text here...




System Overview
The methodology operates in two phases:
Ground Exploration:
Quadruped and tracked robots navigate debris-filled, GPS-denied environments, collecting LiDAR data to generate accurate 3D maps.Aerial Inspection:
Drones are deployed from the robot-mounted platform to inspect inaccessible areas such as vaults and elevated structures.
All data are fused into a high-fidelity 3D digital model, where AI-based algorithms automatically detect and map structural damage such as cracks.
Technologies & Tools
Mechanical design for robotics integration
Additive manufacturing (SLS 3D printing)
Mobile robotics (Boston Dynamics Spot)
UAV deployment systems
LiDAR-based 3D mapping
AI-based damage detection
Impact
Enabled safe and autonomous inspection workflows in hazardous post-earthquake environments
Reduced risk for human operators while improving data quality and inspection efficiency
Successfully validated in real-world scenarios on historical churches in Genova