2-Axis Robotic System for Automated Non-Destructive Inspection (NDT)
Bachelor's Thesis - Robotics System Design
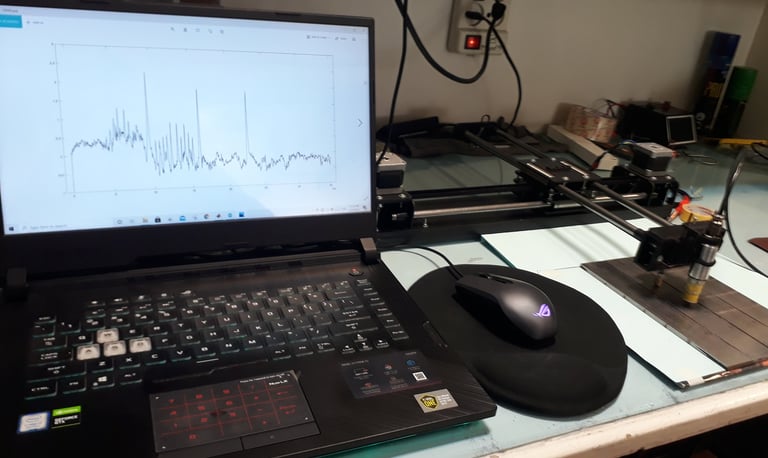
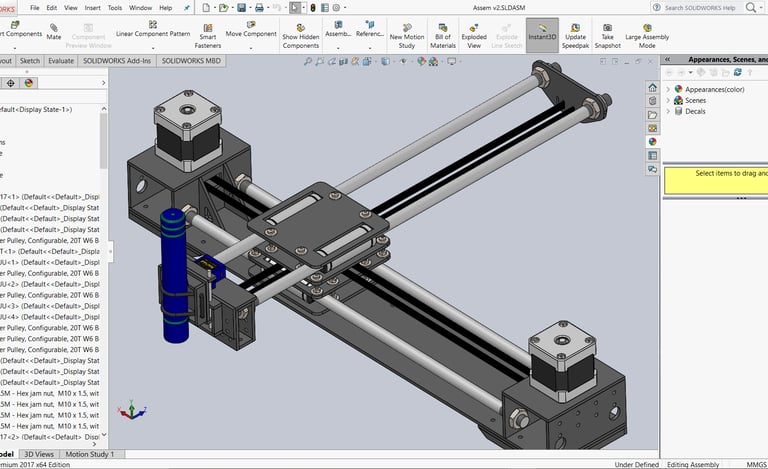
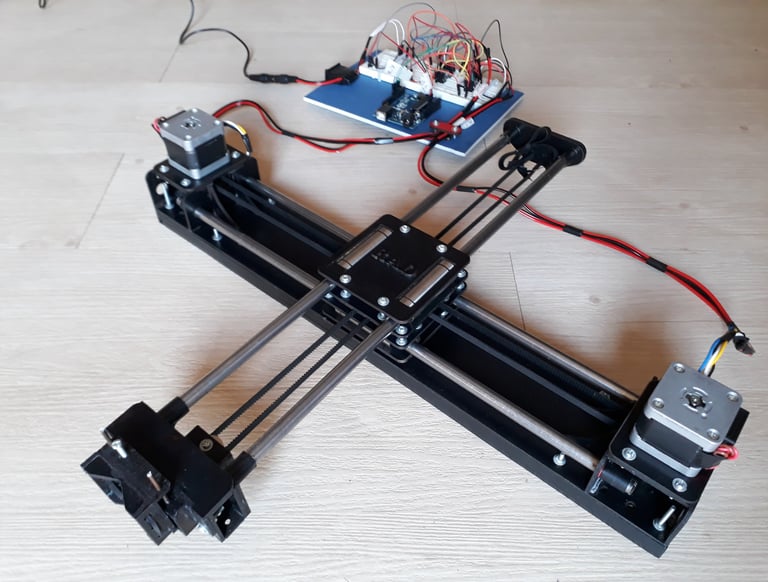
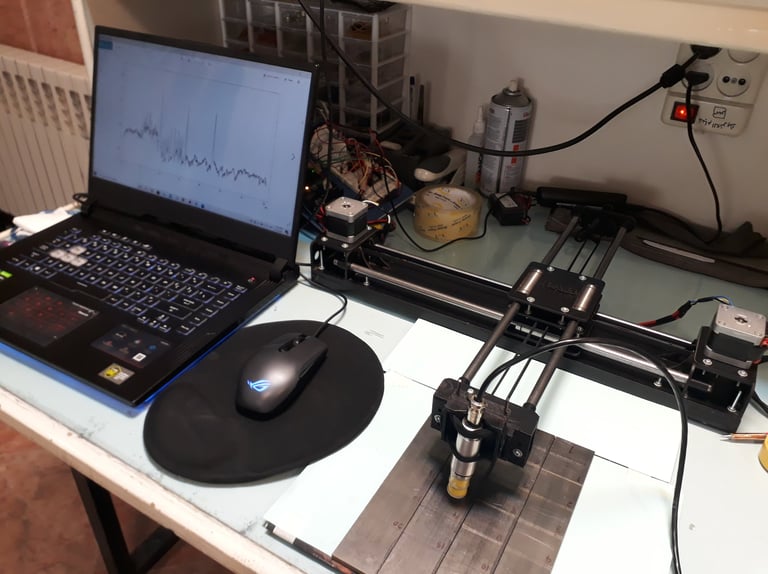
This project focused on the design and development of a high-precision 2-axis robotic system for automated non-destructive testing (NDT) of metallic structures using the eddy current inspection method. The core objective was to engineer a mechanically robust, accurate, and cost-efficient robotic platform capable of replacing conventional industrial robotic arms in surface inspection tasks.
Independently Led and Executed:
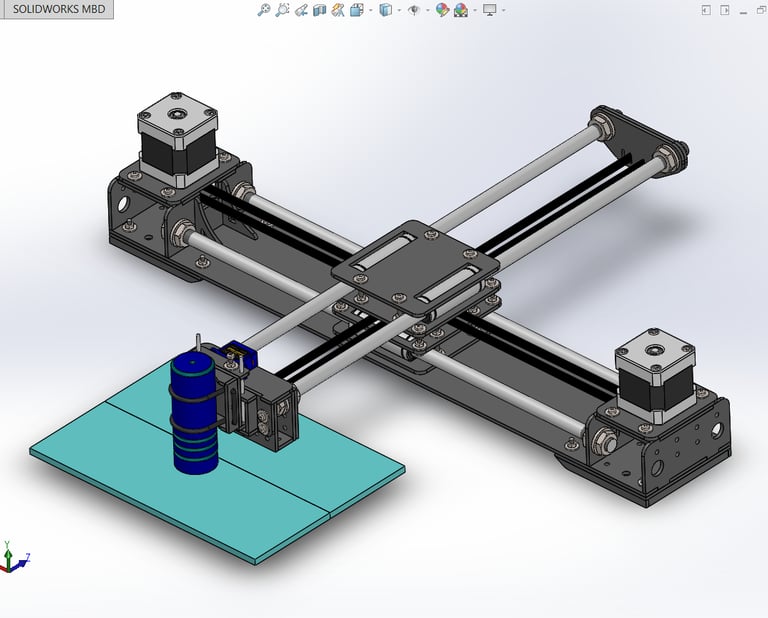
Designed, programmed, and built a custom 2-DOF XY robotic mechanism with ±0.1 mm positioning accuracy
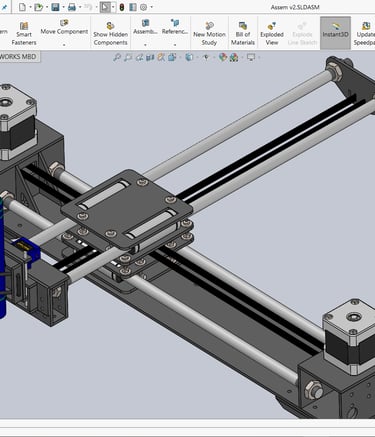
Led the complete mechanical design process in SOLIDWORKS, including structure, transmission system, and precision-guided motion architecture
Developed a custom end-effector with an integrated linear spring mechanism to ensure stable and consistent probe contact during scanning
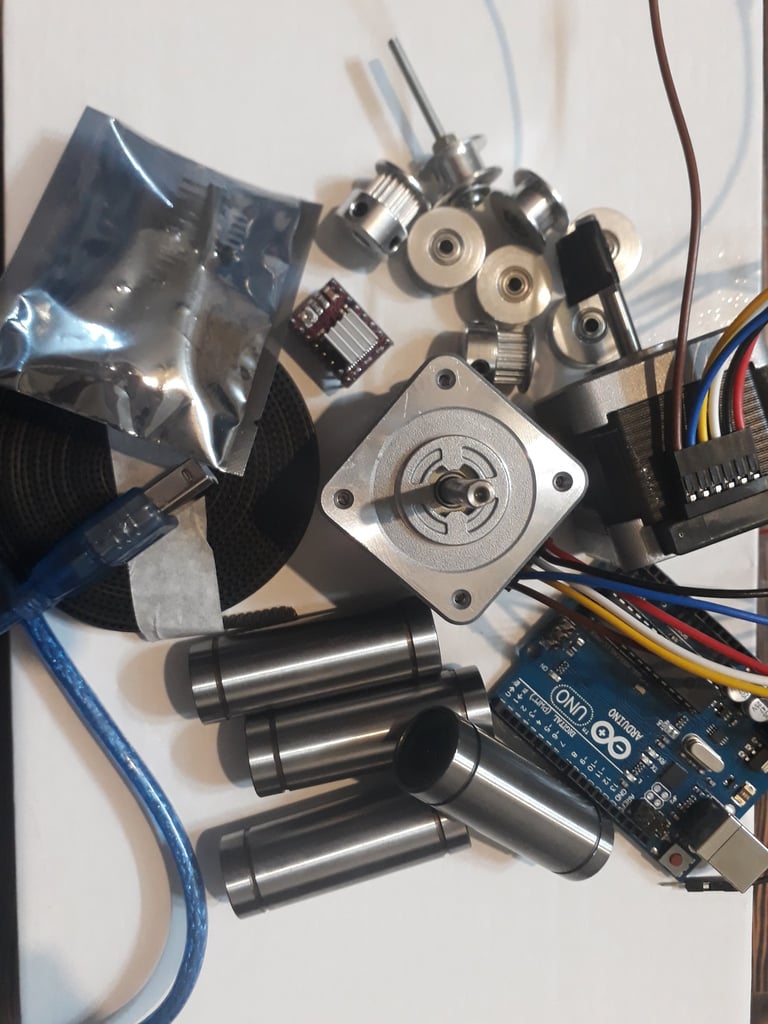
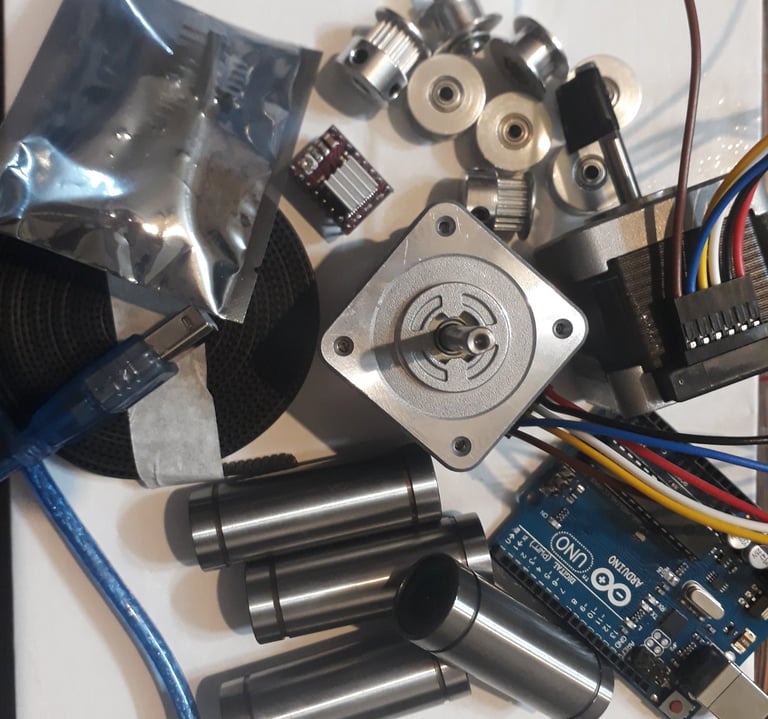
Designed and implemented the electrical system and control architecture
Programmed the robot for precise motion control, trajectory execution, and automated scanning
Data Analysis
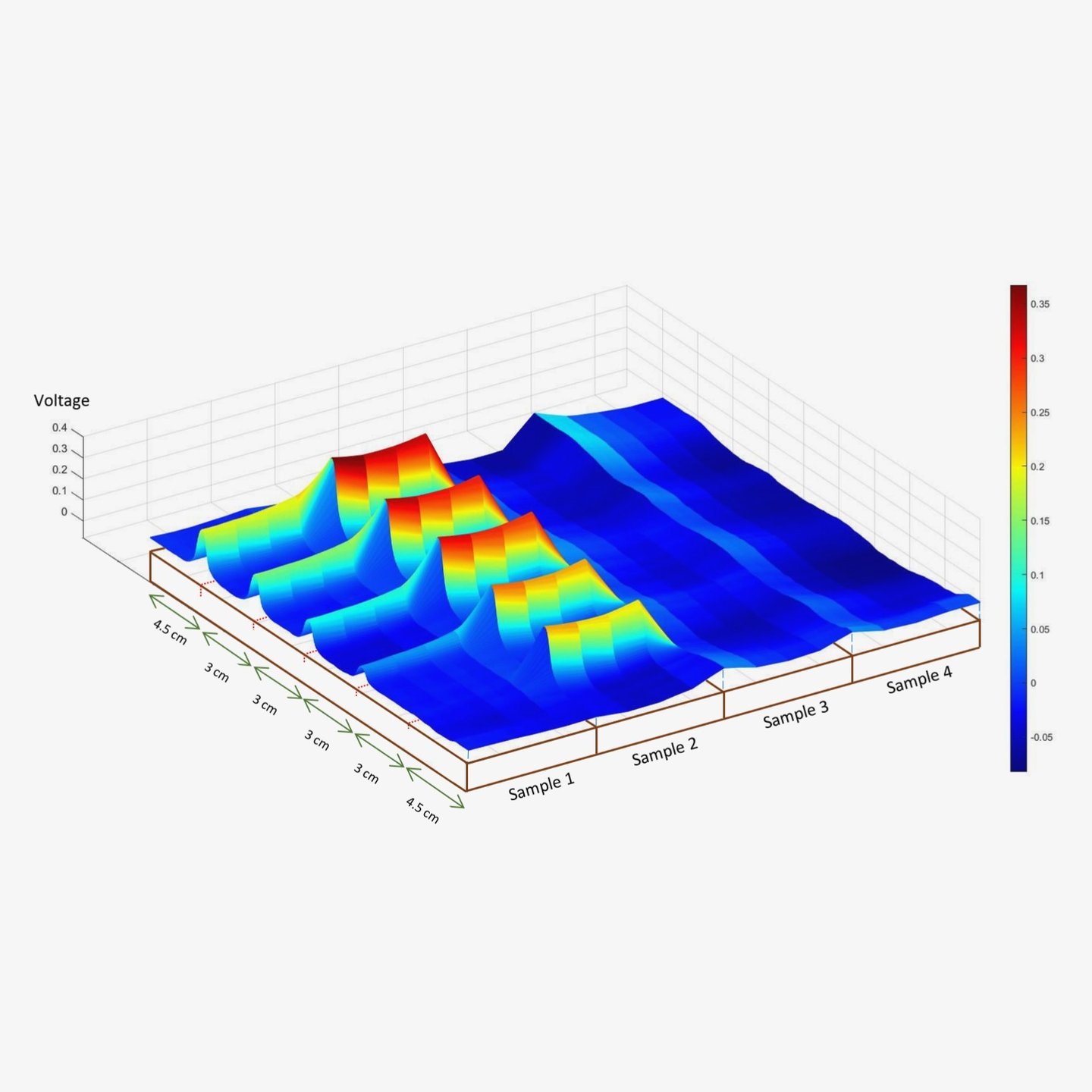
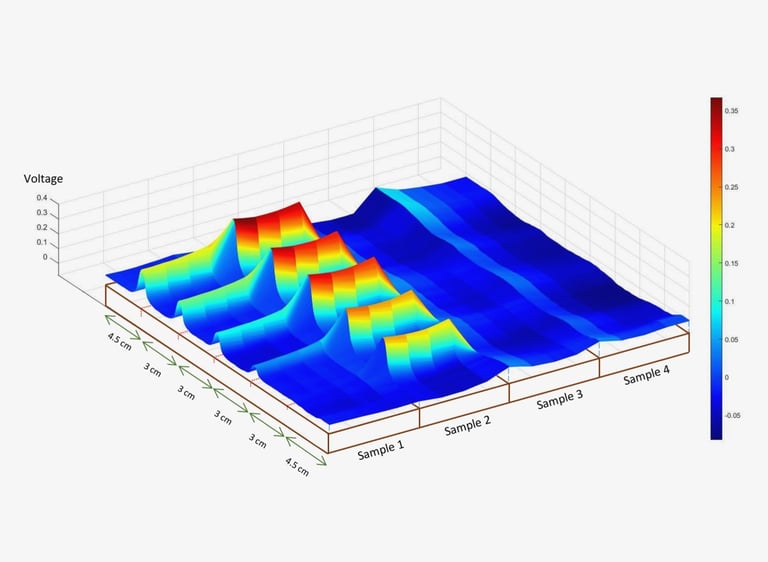
Processed ~405 million data points per test using MATLAB
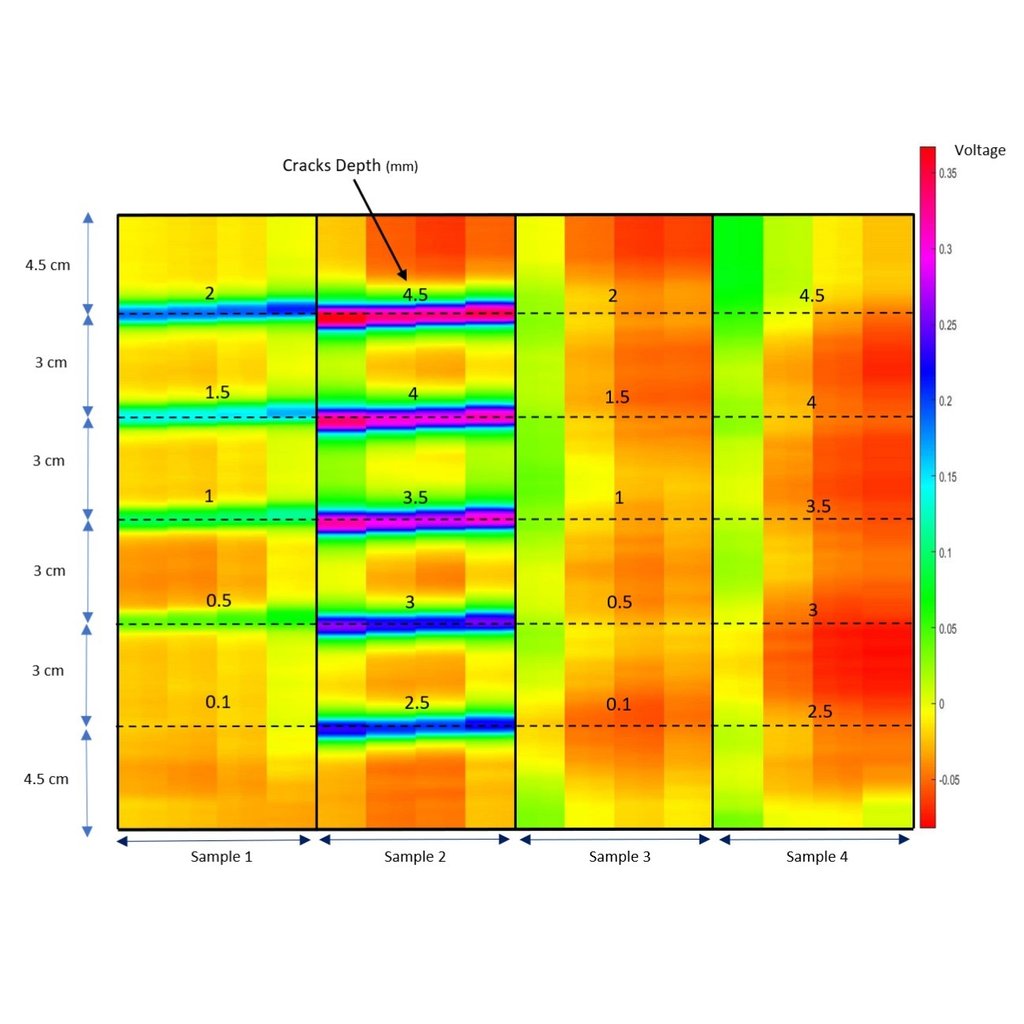
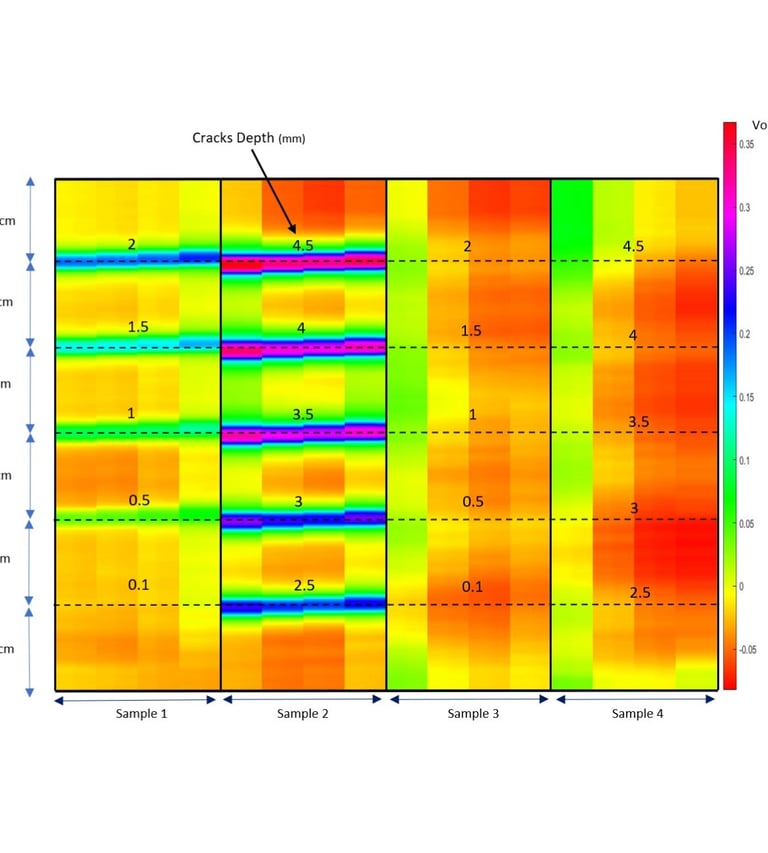
Generated high-resolution C-scan images for defect visualization
Performed a systematic parametric study, optimizing:
Scanning speed
Excitation frequency
Probe-to-surface distance
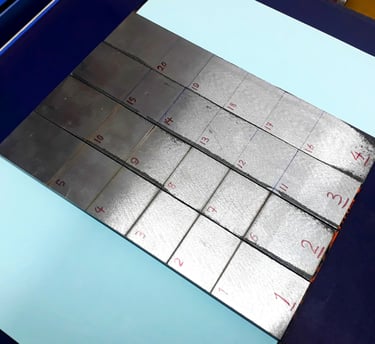
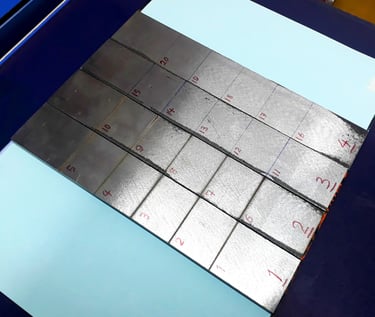
Validated system performance across multiple materials (steel & aluminum)
Impact & Innovation
Successfully executed 480+ automated inspections with high repeatability
Achieved high-precision robotic scanning suitable for industrial applications
Delivered a mechanically efficient and low-cost alternative to traditional robotic arms
Designed a modular robotic platform adaptable to:
XY plotters
2-axis CNC machines
Automated inspection systems
Outcome
Awarded Best Bachelor Thesis (20/20)
Evaluated by the University President as thesis examiner
Led to ongoing research and journal paper development
Enabled further experimental expansion beyond the original scope