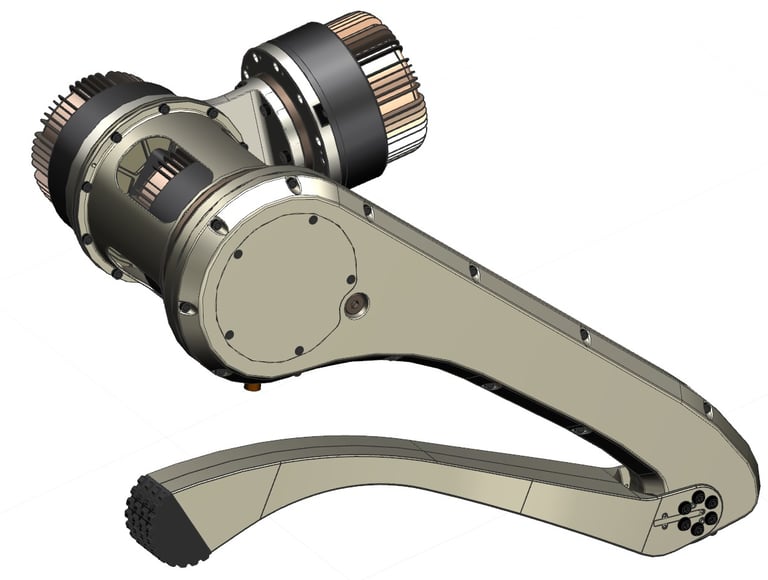
PEGASUS – Lunar Quadruped Robotic Leg
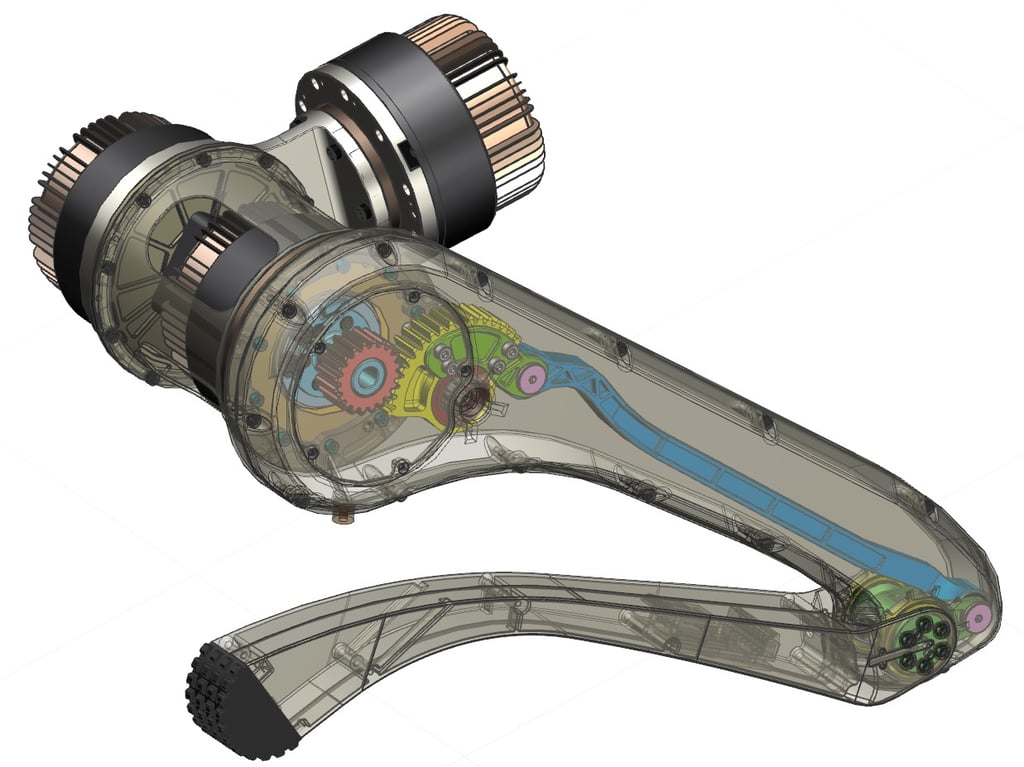

High-torque (220 Nm), lightweight (2.6 kg- without the actuators), and fully sealed—this space-grade robotic leg is built to perform in the harsh realities of the Moon.
I led the end-to-end design and development of this robotic leg, taking it from concept to a fully validated physical system.
Italian Institute of Technology (IIT) – Dynamic Legged Systems Lab
Collaboration with ESA, ASI, and Thales Alenia Space
Project Overview
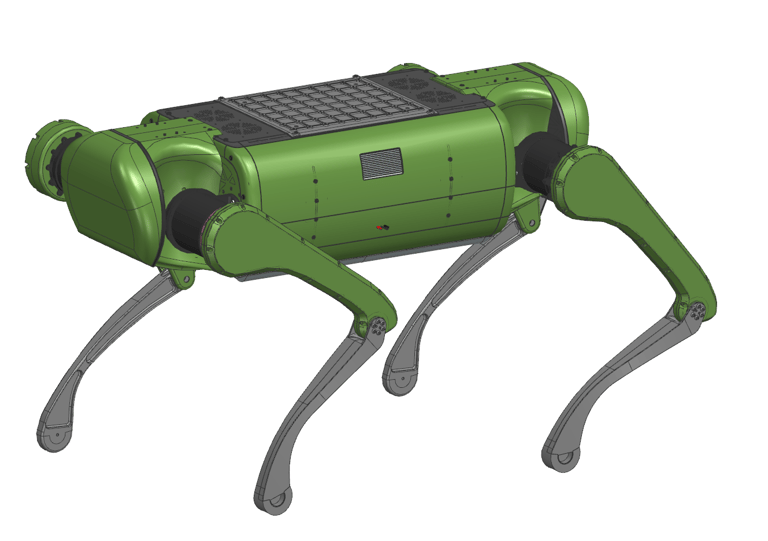
PEGASUS is a quadruped robotic platform designed for future planetary exploration missions, particularly for operation in lunar environments. The goal of this work was to design and develop a space-grade quadroped robot capable of operating reliably under the harsh environmental conditions of extraterrestrial terrain.
This project involved the complete design and development of a novel robotic leg architecture, covering the full engineering lifecycle from initial concept and research to prototype manufacturing and experimental validation.
The resulting robotic leg prototype was successfully manufactured and experimentally tested, demonstrating the feasibility of the proposed design.






Role and Responsibilities
I was responsible for the complete mechanical design and development of the robotic leg. My work included:
Concept generation and locomotion strategy analysis
Mechanical architecture design
Kinematic and dynamic modeling
Transmission and mechanism design
Structural optimization and Finite Element Analysis
Prototype manufacturing preparation
Mechanical assembly and integration
Experimental validation and testing
The design process was carried out considering the unique constraints of lunar environments, including:
Low gravity
Abrasive regolith terrain
Extreme temperature variations
UV exposure
Dust intrusion risks
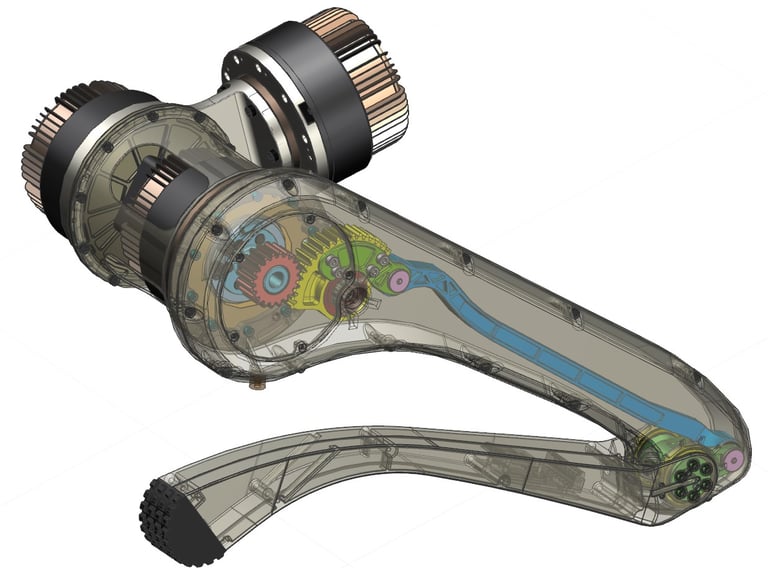
Mechanical Design and Architecture
I designed this robotic leg from scratch with the goal of achieving high torque capability, structural robustness, and minimal weight.
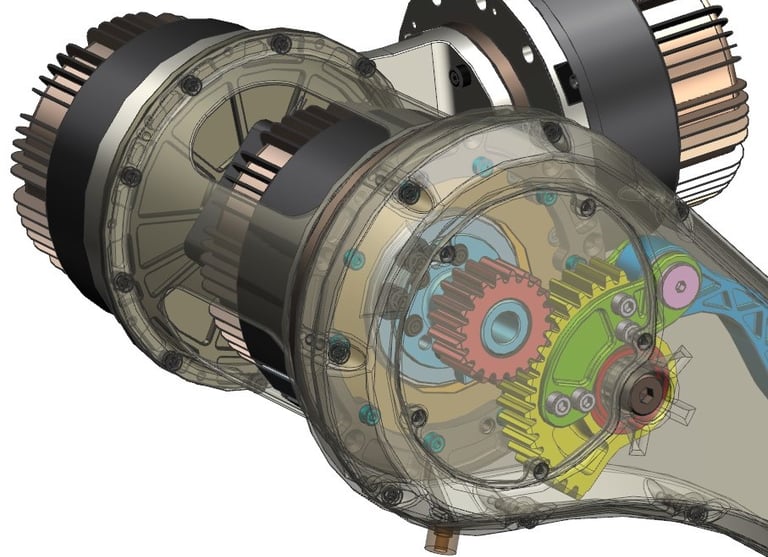
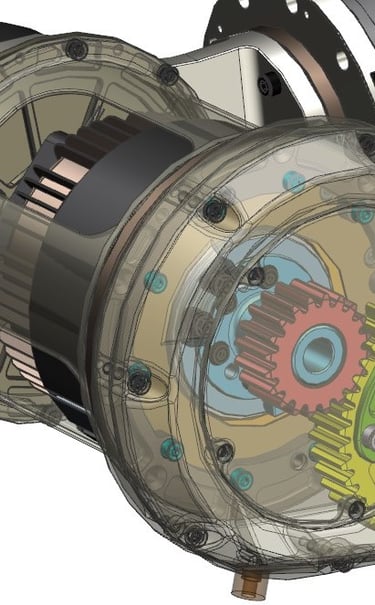
A key design focus was the knee joint mechanism, which required high torque output while maintaining compactness and reliability.
Two different knee transmission concepts were developed and prototyped:
Four-Bar Linkage (4BL) Knee Mechanism
Range of motion: 120°
Compact design optimized for torque transmission
High structural stiffness
Chain-Based Knee Transmission
Range of motion: 300°
Extended mobility and flexibility
Suitable for large joint rotations
Both mechanisms were designed, manufactured, and experimentally evaluated to study their performance.
The knee transmission system is capable of delivering 220 Nm output torque, achieved through mechanical torque amplification within the transmission architecture.








Structural Design and Mass Optimization
Weight reduction was a critical objective due to the constraints associated with space robotics systems.
Through careful structural design and optimization, the final leg structure achieved a mass of:
2.6 kg (excluding actuators)
while maintaining high structural integrity and stiffness.
Finite Element Analysis (FEA) was performed using ANSYS to validate the structural performance of the components under operational loads.
Environmental Robustness and Sealing
Planetary environments pose significant risks due to dust, debris, and regolith intrusion.
To address this, the knee joint was designed with a fully enclosed architecture, providing:
Protection against dust and small debris
Sealed mechanical interfaces
Improved durability for planetary surface operations
The leg structure was designed using metal-only components, ensuring resistance to:
Extreme temperature variations
UV exposure
Long-term environmental degradation
Additionally, the transmission system was designed to achieve minimal mechanical backlash, improving precision and control stability.
Simulation and Engineering Tools
The design and analysis workflow included:
CAD Design: Siemens NX
Structural Simulation (FEA): ANSYS
Kinematic and dynamic modeling
Motion analysis and mechanism evaluation
Prototype Manufacturing and Integration
Following the design and simulation phase, the robotic leg components were manufactured and assembled into a functional prototype.The prototype included:
Structural components
Transmission mechanisms
Mechanical integration of joints and links
Experimental Validation
A comprehensive testing campaign was conducted to validate the mechanical performance of the system.
The experimental evaluation included:
Structural load testing
Endurance testing
Torque transmission verification
Backlash measurement
Joint stiffness characterization
All tests confirmed the successful operation of the robotic leg prototype and validated the design methodology.